

Системы Поляризованные электромагнитные системы
Поляризованные электромагнитные системы отличаются наличием двух не зависящих друг от друга магнитных потоков: постоянного, не зависящего от состояния схемы, в которую включен механизм, и переменного, зависящего от состояния схемы, в которую включен механизм. Первый, поляризующий, поток Фп создается либо постоянным магнитом (рис. 9-1), либо электромагнитом с независимым питанием. Второй, рабочий, поток Ф, создается электромагнитом. Значение и направление рабочего потока зависят от состояния схемы, в которую включен механизм.
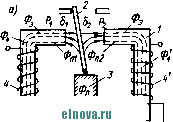
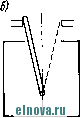
Рис. 9-1. Принцип устройства поляризованной магнитной системы
Принцип действия. Образованный магнитом 3 поляризующий поток Фп, пройдя через якорь 2, разветвляется. Одна его часть Фп1 проходит через зазор 1 и левую часть сердечника 1. Вторая его часть Фп2 проходит через зазор 2 и правую часть сердечника. Катушками 4 и 4, надетыми на сердечник и включенными согласно, создается рабочий поток. Основная его часть Фэ замыкается через весь воздушный зазор 61-1-62 и сердечник, охватывая обе катушки. Меньшие части этого потока Ф и Ф замыкаются через якорь, соответствующий воздушный зазор и часть сердечника, охватывая только одну катушку.
При наличии только одного поляризующего потока якорь отклонится к одному из полюсов магнита, так как с уменьшением зазора (в нашем примере 61) часть поляризующего потока в этом зазоре увеличится за счет уменьшения его доли в другом зазоре. При появлении рабочего потока в одном из зазоров будем иметь разность потоков, а в другом - сумму. В нашем примере в зазоре 1 - поток Фп, - Фэ - Ф4, в зазоре 2 - поток Фп2 + Фэ + Ф4-По мере увеличения рабочего потока поток в зазоре61 будет все уменьшаться, а в зазоре 2 - увеличиваться. При каком-то соотношении потоков якорь перекинется на правую сторону, т. е. система сработает.
Для возврата системы в исходное положение нужно изменить полярность тока (а следовательно, и потока) в рабочих катушках. Можно настроить систему так, что якорь вернется в исходное положение при снижении рабочего потока и сохранении его полярности. Для этого необходимо, чтобы, перекинувшись вправо, якорь не переходил через нейтральное положение (рис. 9-1,6), т. е. чтобы при любом положении якоря один и тот же воздушный зазор оставался меньше другого (например, 1 < 2). Такая настройка называется настройкой на преобладание. Якорь в зависимости от полярности тока в рабочей катушке может отклоняться в ту или другую сторону. При обесточенной катушке якорь вернется в нейтральное положение.
Особенностями этих систем являются направленность действия, высокая чувствительность, большая кратность термической стойкости, быстродействие.
Магнитоэлектрические системы
Магнитоэлектрические системы основаны на использовании сил взаимодействия магнитного поля постоянного магнита и тока в подвижной катушке или рамке. Системы могут выполняться с вращательным (рис. 9-2, а, б) и с поступательным (рис. 9-2, в) движением рамки.
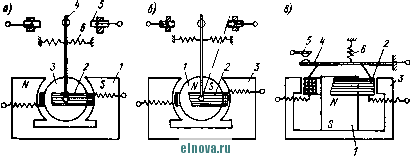
Рис 9-2. Принцип устройства магнитоэлектрических систем реле с вращательным (а, б) и поступательным (в) движением рамки
I – постоянный магнит, 2 - рамка с обмоткой, 3 - магнитопровод, 4 - подвижный контакт, 5 - неподвижные контакты, 6 - возвратные пружин
Особенностями магнитоэлектрических систем являются направленность действия (при изменении направления тока в катущке меняется направление силы и момента) и высокая чувствительность (магнитоэлектрические системы реле могут быть построены на мощность 10-10"° Вт).
Недостатком является то, что магнитоэлектрические системы пригодны только для постоянного тока