

12. Теорема Вариньона.
Если система сил, приложенных к абсолютно твердому телу имеет равнодействующую, то момент равнодействующей относительно произвольного центра (оси) равен сумме моментов всех сил системы относительно того же центра (оси).
Векторная запись
теоремы:
![]()
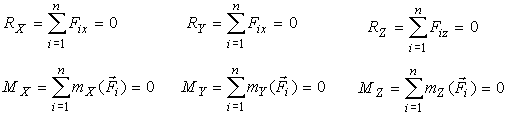
13. Условия равновесия плоской системы пары сил.
Для равновесия плоской системы сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на две координатные оси и алгебраическая сумма моментов всех сил относительно произвольной точки равнялись нулю. Второй формой уравнения равновесия является равенство нулю алгебраических сумм моментов всех сил относительно любых трех точек, не лежащих на одной прямой.
F=Fk=0, М=М(Fk)=0
14. Равновесие системы тел.
15. Пространственная система сил. Момент силы относительно точки и оси.
Пространственная
система сил.
Момент силы
относительно оси
– скалярная величина, равная моменту
проекции этой силы на плоскость,
перпендикулярную оси, взятому относительно
точки пересечения оси с плоскостью.
Момент >0, если смотря навстречу оси,
мы видим поворот, который стремится
совершить сила направленный против
час.стр.
![]() ,
,
На рис. М>0. Момент силы относительно оси равен 0: 1) если сила параллельна оси (Fxy=0), 2) если линия действия силы пересекает ось (h=0); т.е. если ось и сила лежат в одной плоскости. Аналитические выражения моментов силы относительно осей координат: Мx( )=yFz – zFy; Мy( )=zFx – xFz; Мz( )=xFy – yFx.
16. Теорема о переносе пары сил в параллельную плоскость.
Действие пары сил на твердое тело не изменится от переноса этой пары в параллельную плоскость.
Доказательство:
Пусть на твердое тело действует пара
сил
![]() в плоскости
в плоскости
![]() .
Из точек приложения сил А и В опустим
перпендикуляры на плоскость
.
Из точек приложения сил А и В опустим
перпендикуляры на плоскость
![]() и в точках их пересечения с плоскостью
приложим две системы сил
и в точках их пересечения с плоскостью
приложим две системы сил
![]() и
и
![]() ,
каждая из которых эквивалентна нулю.
,
каждая из которых эквивалентна нулю.
![]()
![]()
![]()
![]()
Сложим две равные
и параллельные силы
![]() и
и
![]() .
Их равнодействующая
.
Их равнодействующая
![]() параллель-на этим силам, равна их сумме
и приложена посредине отрезка
параллель-на этим силам, равна их сумме
и приложена посредине отрезка
![]() в точке О. Сложим две равные и параллельные
силы
в точке О. Сложим две равные и параллельные
силы
![]() и
и
![]() .
Их равнодействующая
.
Их равнодействующая
![]() параллель-на этим силам, равна их сумме
и приложена посредине отрезка
параллель-на этим силам, равна их сумме
и приложена посредине отрезка
![]() в точке О. Так как
в точке О. Так как
![]() ,
то система сил
,
то система сил
![]() эквивалентна нулю и ее можно отбросить.
Таким образом пара сил
эквивалентна паре сил
эквивалентна нулю и ее можно отбросить.
Таким образом пара сил
эквивалентна паре сил
![]() ,
но лежит в другой, параллельной плоскости.
,
но лежит в другой, параллельной плоскости.