

7.5. Контрольные вопросы
1. Что называют трансформатором?
2. Назначение и область использования трансформатора,
3. Устройство однофазного трансформатора.
4. Виды трансформаторов.
5. Принцип работы трансформатора.
6. Что называется коэффициентом трансформации?
7. Какой вид имеют уравнения баланса ЭДС и напряжений для первичной и вторичной цепей?
8. Как получить уравнение МДС и токов однофазного трансформатора?
9. Как определить номинальные токи первичной и вторичной обмоток однофазного трансформатора, если известны его номинальные мощность и напряжения?
10. Какой вид имеет схема замещения однофазного трансформатора?
11. Какие величины и параметры определяются при выполнении опытов холостого хода и короткого замыкания?
12. Почему с изменением тока нагрузки изменяется напряжение на зажимах вторичной обмотки?
13. Что показывают коэффициент мощности и КПД?
14. Какой вид имеют характеристики I1(β), cosφ1(β), η(β)?
Лабораторная работа № 8
ИСПЫТАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Цель работы:
1. Изучить устройство и принцип действия трехфазного асинхронного электродвигателя с короткозамкнутым ротором.
2. Ознакомиться со способом • маркировки выводов фаз обмотки статора.
3. Исследовать электродвигатель в режиме холостого хода и под нагрузкой и построить его характеристики.
4. Ознакомиться со способом искусственного улучшения коэффициента мощности установки с асинхронным электродвигателем.
8.1. Общие теоретические положения.
Трехфазный асинхронный электродвигатель с короткозамкнутым ротором широко используется в промышленности благодаря простоте конструкции, надежности и простоте в эксплуатации, высокому КПД и невысокой стоимости. Он служит для преобразования электрической энергии трехфазного переменного тока в механическую, снимаемую с вала двигателя и используемую для привода в движение различных исполнительных механизмов. Электродвигатель с фазным ротором (с контактными кольцами) применяется в текстильных исполнительных механизмах, где требуются плавные пуск и .регулирование скорости, например для привода печатных машин, каландра сушильных барабанов, в пищевой промышленности - на сахарных заводах в приводах центрифуг, в некоторых прокатных станах, особенно когда они снабжены маховиком, в приводах с вентиляционным моментом, в крановых устройствах, в подъемниках различного вида.
Однако по сравнению с короткозамкнутым стоимость фазного двигателя выше, устройство его сложнее, он имеет меньший КПД и cos φ. Поэтому в современной практике заметна тенденция отказа от двигателей с фазными роторами. Их применяют в тех случаях, когда короткозамкнутые не проходят по нагреву, не дают требуемых характеристик или не могут быть установлены по условиям работы трехфазной сети.
Трехфазный асинхронный электродвигатель состоит из двух основных частей: неподвижной - статор - и вращающейся - ротор. Статор и ротор разделены воздушным зазором.
Статор (рис. 8.1) выполняется из следующих основных деталей:
1) корпуса (станины) с клеймом коробкой, рымболтом, лапами (или фланцем) и табличкой паспортных данных (рис. 8.2);
2) сердечника, который запрессовывается внутрь корпуса, собирается из отдельных тонких изолированных листов электротехнической стали (рис. 8.3), с высечками по внутренней поверхности, которые в собранном сердечнике образуют продольные канавки - пазы;
3) обмотки, состоящей из трех фазных катушек, оси которых смещены относительно друг друга на 120°. Каждая фазная катушка (сокращенно фаза) состоит из секций (рис. 8.4). Выводы каждой фазы сосредотачиваются в клемной коробке (6 выводов). Начало каждой фазы

Рис. 8.1 Рис. 8.2


Рис. 8.4 Рис. 8.3
принято обозначать CI, С2, СЗ, а их концы соответственно С4, С5, Сб. Между собой фазы могут быть соединены по схеме "звезда" или ''треугольник". Конкретный вид соединения обмотки статора зависит от системы напряжений сети и от напряжения на которое рассчитана фаза обмотки. , Напряжение фазы определяем по табличке двигателя. Например, в табличке двигателя имеется следующая запись: Δ/Y -220/380. Это означает, что фаза обмотки статора рассчитана на 220 В. Поэтому для подключении такого двигателя в сеть 380/220в обмотку статора следует соединять "звездой", а при подключении в сеть 220/127 В "треугольником”;
4) к статору двигателя относят также и два подшипниковых щита (крышки), которые закрывают его с двух сторон. В крышках имеются подшипники, в которые вставляются концы вала ротора. Для двигателя с фазным ротором на одной из крышек крепится щеточный механизм с тремя
медно-графитными щетками.
Ротор трехфазного асинхронного двигателя бывает двух видов с коротко замкнутой (рис. 8.5) и фазной обмоткой (рис. 8.6) и состоит из следующих деталей:

Рис 8.5
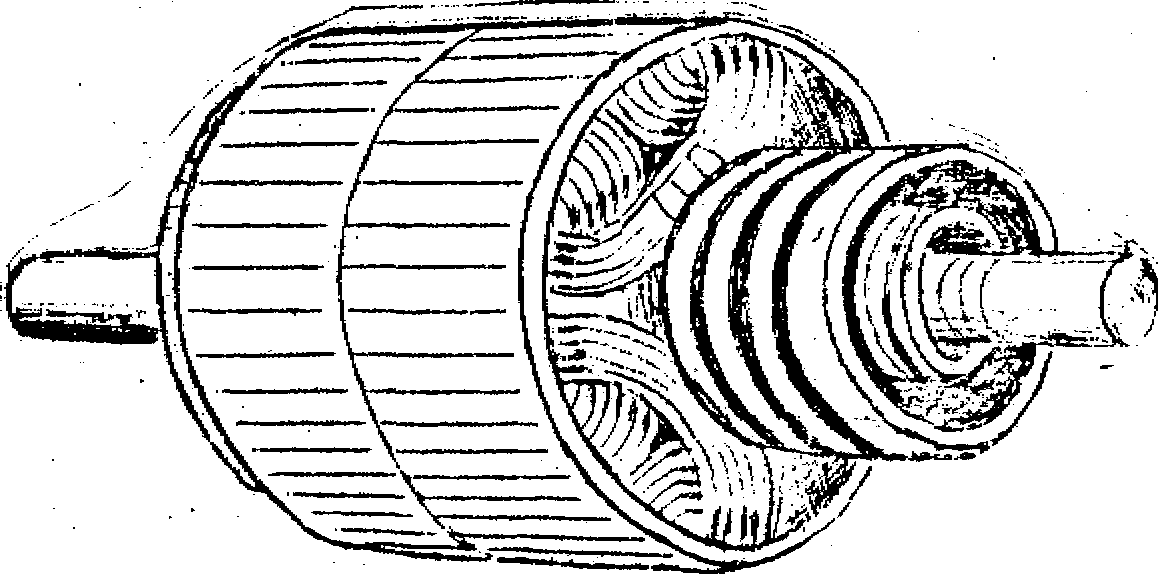
Рис.8.6

 Рис.
8.7
Рис.
8.7
Рис.8.8.
1) вала, концы которого закреплены в подшипниках крышек;
2) сердечника, выполненного так же, как сердечник статора, но пазы расположены по внешней поверхности (рис.8.7);
Рис. 8.5
3) обмотки, которая может быть короткозамкнутой и фазной.
Короткозамкнутая обмотка ротора может выполняться из медных стержней, уложенных в пазы сердечника и замкнутых накоротко с двух сторон медными кольцами. Она напоминает "беличье колесо" (рис. 8.8). В
современных асинхронных двигателях такая обмотка выполняется заливкой пазов сердечника ротора расплавленным алюминием, что существенно снижает стоимость ротора. Фазная обмотка выполняется точно так же, как и обмотка статора. Между собой фазы обмотки ротора соединяют по схеме "звезда". Свободные выводы обмотки ротора подсоединяют к трем медным или стальным контактным кольцам, которые насажаны на вал и изолированы как от него, так и друг от друга. По кольцам скользят три неподвижных щетки, укрепленные на крышке. Контактные кольца через щетки могут быть соединены с трехфазным реостатом. Для охлаждения двигателя на его вал насаживают крыльчатку вентилятора. На рис. 8.9 приведен общий вид трехфазного асинхронного электродвигателя с короткозамкнутым ротором, а на рис. 8.10 - с фазным.
|
|


Рис.8.9 Рис.8.10
Принцип действия
При подключении обмоток статора к сети трехфазного переменного тока по фазам обмотки начинают протекать токи, которые образуют в статоре вращающееся магнитное поле. Поле статора вращается в направлении порядка следования фаз со скоростью
![]() (8.1)
(8.1)
где f - частота токов статора; р - число пар полюсов.
Эту скорость принято называть синхронной. Значения синхронных скоростей для f = 50 Гц приведены в табл. 8.1.
Таблица 8.1
Р |
I |
2 |
3 |
4 |
..... |
40 |
Ηоб/мин |
3000 |
1500 |
1000 |
750 |
..... |
75 |
Поле статора, вращаясь, пересекает обмотку статора и ротора и наводит в них ЭДС. Если обмотка ротора не замкнута через кольца и щетки, то ротор будет оставаться неподвижным, а асинхронный двигатель - уподобляться трехфазному трансформатору, отличающемуся от обычного трансформатора только в конструктивном отношении (наличие зазора, распределенная обмотка на статоре и роторе и т.д.).
Коэффициент трансформации асинхронного двигателя
![]() (8.2)
(8.2)
где Е1 и Е2 - ЭДС обмотки соответственно статора и ротора; К1 и К2 - обмоточные коэффициенты обмотки соответственно статора и ротора.
Если обмотку ротора замкнуть накоротко или через трехфазный реостат, то наведенная ЭДС создаст в ней ток. Ток обмотки ротора, взаимодействуя с вращающимся магнитным полем статора, приведет ротор во вращение в том же направлении, в котором вращается поле статора. Скорость вращения ротора n2 будет меньше синхронной. Разность между скоростью поля статора и скоростью ротора оценивается скольжением
![]() (8.3)
(8.3)
Согласно (8.3), скольжение в режиме двигателя может меняться в пределах от единицы до нуля. При холостом ходе скольжения составляет доли процентов, при номинальной нагрузке - 2...8%. Из (8.3) нетрудно определить скорость вращения ротора
![]() (8.4)
(8.4)
При номинальной нагрузке для P=2 n2=1420 об/мин, а при р = 3, n2=950 об/мин.
Блок-схема трехфазного асинхронного электродвигателя показана на рио« 8.11.

Рис. 8.11
В процессе работы электродвигателя часто возникает необходимость в изменении его направления вращения или так называемом реверсировании. Для асинхронного электродвигателя эта задача решается весьма просто. Направление вращения магнитного поля статора определяется последовательностью фаз .трехфазной сети, питающей обмотки статора. Изменение последовательности фаз меняет направление вращения магнитного поля статора, а следовательно, и направление вращения ротора. Таким образом, для реверсирования асинхронного двигателя практически достаточно поменять местами два соединительных провода, связывающих двигатель с сетью.
Судить о рабочих свойствах асинхронного двигателя можно по его характеристикам:
1) зависимости момента от скольжения M=f(S);
2) механической характеристики n2=f(M);
3) рабочим характеристикам, т.е. зависимостям S, n2, M, I1, cos φ1, η полезной мощности на валу двигателя P2.
Рассмотрим прежде всего характер зависимости M=f(S). С этой целью выведем уравнение момента и проанализируем его при различных значениях S (в диапазоне от S = 0 до S = I).
Известно, что на проводник с током, находящийся а магнитном поле, действует сила fпр определяемая по формуле:
fпр = Bi2l, (8.5)
где B - индукция магнитного поля под полюсом; i2 - ток в проводнике обмотки ротора; l - длина проводника.
Если этот проводник расположить вдоль образующей цилиндрической поверхности ротора, то при наличии силы -fпр возникает момент
Mпр= B i2 l * D/2 (8.6)
где D - диаметр ротора.
Поскольку ротор асинхронного двигателя состоит не из одного, а из N проводников, распределенных по его окружности, то можно говорить о некотором среднем моменте Мд, возникающем из-за воздействия вращающегося магнитного поля на ток всех проводников ротора:
![]() (8.7)
(8.7)
где α - пространственный угол окружности ротора.
Чтобы перейти от (8.7) в интегральной форме к практическим удобным расчетным соотношениям, учтем, что магнитная индукция от проводника к проводнику и ток в проводниках меняется синусоидально, т.е.
![]() (8.8)
(8.8)
![]() (8.9)
(8.9)
где Bm ,I2m, - амплитудные значения соответственно магнитной индукции и тока ротора; ψ2 - угол сдвига фаз между ЭДС и током ротора.
Примем также во внимание, что
![]() (8.10)
(8.10)
![]() (8.11)
(8.11)
![]() (8.12)
(8.12)
![]() (8.13)
(8.13)
где ф - магнитный поток одного полюса; Вср - среднее значение магнитной индукций под полюсом; τ - полюсное деление; P - число пар полюсов; C =const ; m2 - число фаз обмотки ротора; W2 - количество витков фазы обмотки ротора.
После подстановки (8.8)-(8.13) и (8.6) в (8.7) и несложных математических преобразований получим
![]() (8.14)
(8.14)
где I2- действующее значение тока ротора.
Отдельные составляющие уравнения (8.14) определяются соотношениями
![]() (8.15)
(8.15)
 (8.16)
(8.16)
 (8.17)
(8.17)
где E1 – ЭДС фазы обмотки статора; W1- количество витков фазы обмотки статора, R2 и Х2 - соответственно активное и индуктивное сопротивление обмотки ротора.
Используя эти соотношения, получим из (8.14) следующее выражение для вращающегося момента:
 (8.18)
(8.18)
где
![]()
Если задаваться различными значениями S , то, пользуясь (8.18), можно определить соответствующие ему значения момента и построить график зависимости M = f (S) , характер которой показан на рис. 8.12.
На этом графике можно отметить значения четырех характерных точек - моментов:
1) начального пускового Mn,при S=I;
2) максимального Mmax соответствующего критическому скольжению SK;
3) M = 0, которое соответствует величине S=0 (режим идеального холостого хода двигателя);
4) номинального MH, соответствующее номинальному скольжению SH (в этом режиме двигатель развивает номинальную мощность Р2H).

Отношение максимального момента к номинальному определяет перегрузочную способность двигателя. Обычно эта величина равна 2...3 и приведена в каталогах.
Используя (8.18) и (8.4), можно построить механическую характеристику асинхронного двигателя nH=f(M), общий вид которого показан на рис.8.13. Механическая характеристика позволяет установить, с какой скоростью будет вращаться ротор двигателя при заданном моменте на его валу.

Рис. 8.13
Из анализа механической характеристики следует, что скорость асинхронного двигателя при увеличении момента на валу от нуля до максимального изменяется незначительно. Поэтому, в указанных пределах изменения момента механическая характеристика считается жесткой. При повышении нагрузки свыше максимальной двигатель входит в область неустойчивого режима работы и останавливается.
Наряду с рассмотренными зависимостями наглядно иллюстрируют механические свойства двигателя его рабочие характеристики (рис. 8.14). Они получены при номинальном напряжении сети и дополнительном сопротивлении в цепи ротора RP=0 и называются естественными.
При работе двигателя в обычных условиях с практически достаточной точностью можно считать, что U1 ≈ Е1. Это позволяет сделать вывод, что вращающий момент [см. (8.I8)] асинхронного двигателя пропорционален квадрату напряжения сети. Поэтому даже незначительное изменение напряжения сети вызывает существенное изменение момента двигателя. Например, при снижении напряжения на 10% момент уменьшается на 19%. Если выражение (8.18) продифференцировать по скольжению и приравнять к нулю, определим скольжение, при котором вращающий момент максимален. Это скольжение называется критическим:
![]() (8.19)
(8.19)
Критическое скольжение с увеличением активного сопротивления растет, максимальный момент не изменяется. Это видно из формулы максимального момента, которую мы получаем из (8.18), подставляя вместо S значение SK из (8.19):

Рис 8.14
![]() (8.20)
(8.20)
Важным показателем трехфазного асинхронного электродвигателя является его коэффициент мощности
![]() (8.21)
(8.21)
или
![]() (8.22)
(8.22)
где I1a - активная составляющая тока I1.
С ростом нагрузки активная составляющая тока растет, реактивная (намагничивающая) составляющая почти не меняется. Поэтому при холостом ходе двигателя его коэффициент мощности довольно низок - порядка 0,1...0,2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0,7...О,9) при нагрузке, близкой к номинальной.
Относительно низкий COS φ1 установки с асинхронным двигателем можно повысить подключением на выводы обмотки статора батареи конденсаторов. Значение емкости, необходимой для подключения на одну фазу двигателя, определяют из условия равенства реактивной составляющей тока статора и тока через емкость по формуле:
С=P1 (tg φ1-tg φ)·109/2π f1 U1 2 (8.23)
где Р1 - активная мощность двигателя, кВт; φ1 и φ - угол сдвига фаз соответственно до компенсации и после нее.
В целях уменьшения габаритов конденсаторной батареи емкости включают по схеме "треугольник". При этом значение емкости каждой ветви уменьшается в 3 раза по сравнению с величиной, рассчитанной по (8.23).
Коэффициент полезного действия асинхронного двигателя определяется отношением мощности P2 к подводимой P1,
![]() (8.24)
(8.24)
Разность между мощностями определяет суммарные потери в двигателе. Их можно разделить на постоянные, практически не зависящие от нагрузки, и переменные, зависящие от нее. Постоянные потери - потери в стали и механические, переменные - потери на нагревание проводников обмотки статора и ротора. Переменные потери - добавочные потери, которые возникают вследствие изменения при вращении ротора относительного положения зубцов статора и ротора, что вызывает изменения магнитного сопротивления и пульсации потока. Одним из средств уменьшения этих потерь служит скос пазов ротора по отношению к пазам статора.
Коэффициент полезного действия двигателя достигает максимального значения (65...95%), когда переменные потери равны постоянным. У большинства двигателей такой высокий КПД возникает при нагрузке, равной примерно 75% номинальной.