

2 |
|
Radio PropagationTheory |
|
||
|
|
|
Theory Propagation Radio 2
HF Communications
Over inhabited land areas VHF communications are ideal for all communications between aircraft and ground. However, over oceans and uninhabited land areas, long range systems are required. Satellite Communications (SatCom) are not yet the norm, so long range communication must be provided by surface wave or sky wave propagation.
To achieve ranges of 2000 - 3000 NM using surface wave propagation would require low frequencies either from the lower end of LF band or the upper end of VLF band. Communication systems utilizing these frequencies would require relatively complex equipment with an associated weight penalty. Lower frequencies are also subject to greater static interference than higher frequencies, making such systems somewhat tedious to use. Furthermore, data rates associated with low frequencies are notoriously low.
Currently, therefore, the only practical solution is HF Communications utilizing sky wave propagation. In the future, no doubt, SatCom will become commonplace.
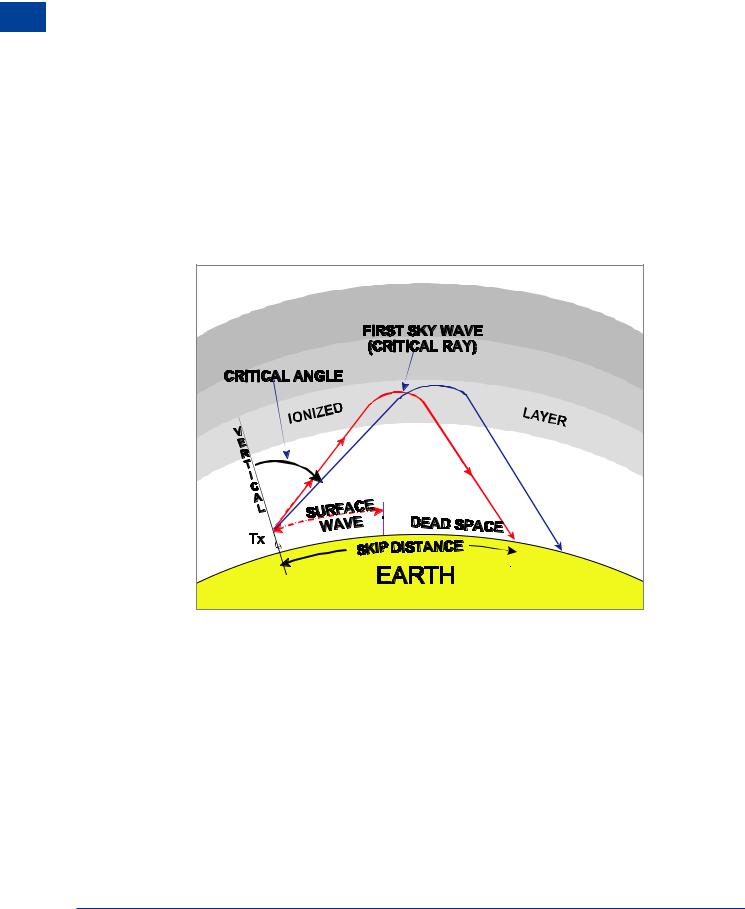
Figure 2.14
The maximum usable frequency (MUF) for a given range will be that of the first returning sky wave and this is the ideal frequency for that range because it will have had the shortest path through the ionosphere, and therefore, will have experienced less attenuation and contain less static interference. However, since the ionization intensity fluctuates, a decrease in ionization would result in an increase in skip distance and hence loss of signal. So a compromise frequency is used, known as the optimum working frequency (OWF), which by decades of experimentation and experience has been determined to be 0.85 times the MUF.
Since ionization levels are lower by night than by day it follows that the frequency required for use at a particular range by night will of necessity be less than the frequency required for use by day. A good rule of thumb is that the frequency required at night is roughly half that required by day.
32

Radio PropagationTheory |
|
2 |
|
||
|
|
|
Because skip distance increases as frequency increases, the range at which communication is required will also influence the selection of the frequency to be used. Short ranges will require lower frequencies and longer ranges will require higher frequency.
A typical example of the sort of problem that may appear is:
An aircraft on a flight from London, UK to New York, USA is in mid-Atlantic at sunrise.
The pilot is in communication with the UK on a frequency of 12 MHz.
What frequency can the pilot expect to use with the USA? (See Figure 2.16).
Figure 2.15 HF Communications Mid-Atlantic
Answer: 6 MHz.
The wave will be refracted halfway between the aircraft and the UK, and halfway between the aircraft and the USA. Midway between the aircraft and the UK it is day, so a relatively high frequency will be required. Midway between the aircraft and the USA it is night so a relatively low frequency will be required.
Radio Propagation Theory 2
33

2 |
|
Radio PropagationTheory |
|
||
|
|
|
Theory Propagation Radio 2
Propagation Summary
The propagation characteristics of each of the frequency bands are summarized below, where propagation paths are in brackets this indicates that the path is present but not normally utilised.
Frequency Band |
Propagation Path |
|
|
|
|
LF |
Surface Wave |
|
(Sky Wave) |
||
|
||
|
|
|
MF |
Surface Wave |
|
(Sky Wave) |
||
|
||
|
|
|
HF |
Sky Wave |
|
(Surface Wave) |
||
|
||
|
|
|
VHF |
Space Wave |
|
|
|
|
UHF |
Space Wave |
|
|
|
|
SHF |
Space Wave |
|
|
|
|
EHF |
Space Wave |
|
|
|
Figure 2.16
34
Radio PropagationTheory |
|
2 |
|
||
|
|
|
Super-refraction
This is a phenomenon which is significant at frequencies above 30 MHz (that is VHF and above). Radio waves experience greater refraction, that is, they are bent downwards towards the earth’s surface more than in normal conditions, giving notable increases in line of sight range to as much as 40% above the usual.
The conditions which give rise to super-refraction are:
•Decrease in relative humidity with height
•Temperature falling more slowly with height than standard
•Fine weather and high pressure systems
•Warm air flowing over a cooler surface
In extreme cases when there is a low level temperature inversion with a marked decrease in humidity with increasing height (simply, warm dry air above cool moist air), a low level duct may be formed which traps radio waves at frequencies above 30 MHz giving extremely long ranges. This phenomenon is known as duct propagation and can lead to exceptionally long ranges. When interference is experienced on UK television channels from continental stations, the reason for this is the forming of such a duct.
This phenomenon is most common where warm desert areas are bordering oceanic areas, e.g. the Mediterranean and Caribbean seas. It can also occur in temperate latitudes when high pressure predominates, particularly in the winter months when the dry descending air in the high pressure system is heated by the adiabatic process and is warmer than the underlying cool and moist air.
Sub-refraction
Much rarer than super-refraction, but still of significance in radio propagation, sub-refraction causes a reduction in the normal refraction giving a decrease in line of sight range by up to 20%.
The conditions which give rise to sub-refraction are:
•An increase in relative humidity with increasing height
•Temperature decreasing with increasing height at a greater rate than standard
•Poor weather with low pressure systems
•Cold air flowing over a warm surface
Radio Propagation Theory 2
35

2 |
|
Radio PropagationTheory |
|
||
|
|
|
Theory Propagation Radio 2
36