


7 Automatic Direction Finder (ADF)
Holding
When density of traffic or bad weather delay an aircraft’s landing at an airport, the air traffic controller directs it to a Holding Area. The area, also known as a ‘stack’, is organized over a ‘radio’ beacon where each waiting aircraft flies a special circuit separated vertically from other aircraft by a minimum of 1000 ft. An aircraft drops to the next level as soon as it is free of other traffic, until it finally flies from the stack and comes in to land.
(ADF) Finder Direction Automatic 7
Figure 7.20 The holding system
96

Automatic Direction Finder (ADF) |
|
7 |
|
||
|
|
|
Runway Instrument Approach Procedures
Most aerodromes have NDB runway instrument approach procedures. The pilot flies the published procedure in order to position the aircraft in poor weather conditions for a visual landing. The NDB may also be used in conjunction with other runway approach aids for the same purpose.
Automatic Direction Finder (ADF) 7
Figure 7.21 Example of an NDB instrument approach
97

7 |
|
Automatic Direction Finder (ADF) |
|
||
|
|
|
(ADF) Finder Direction Automatic 7
Factors Affecting ADF Accuracy
Designated Operational Coverage (DOC)
The DOC of NDBs is based upon a daytime protection ratio (signal/noise ratio of 3:1) between wanted and unwanted signals that permits the required level of bearing accuracy. At ranges greater than those promulgated, bearing errors will increase. Adverse propagation conditions particularly at night will also increase bearing errors.
Static Interference
There are two types of static interference that can affect the performance of ADF:
Precipitation static is generated by the collision of water droplets and ice crystals with the aircraft. It causes a reduction in the signal/noise ratio which affects the accuracy of the bearings and can, in extreme circumstances completely mask the incoming signal. The indications on the RMI/RBI will be a wandering needle and the audio will have a background hiss, which is also likely to be present on VHF frequencies.
Thunderstorms have very powerful discharges of static electricity across the electromagnetic spectrum including LF and MF. These discharges cause bearing errors in the ADF. A static discharge in a cumulonimbus cloud (Cb) will be heard as a loud crackle on the audio and the needle will move rapidly to point to the Cb. When there are several active cells close together, it is possible for the needle to point to them for prolonged periods. Care must be taken in the use of ADF when Cb activity is forecast. It has been said that during Cb activity the only sensible use of the ADF is to indicate where the active cells are.
Night Effect
By day the D-region absorbs signals in the LF and MF bands. At night the D-region disappears allowing sky wave contamination of the surface wave being used. This arises for two reasons: phase interference of the sky wave with the surface wave because of the different paths and the induction of currents in the horizontal elements of the loop aerial. The effect is reduced by the aerial design having very short vertical elements and by screening the aerial above and below, but the contamination is not eliminated. The effect first becomes significant at 70 - 100 NM from the NDB. The effect is manifest by fading of the audio signal and the needle ‘hunting’ and is worst around dawn and dusk, when the ionosphere is in transition.
If ADF is to be used at night:
•Positively identify the NDB call sign.
•Continue to check the tuning and the identification.
•Avoid use of the equipment within 1 hour of sunrise or sunset.
•Use NDBs within their promulgated range which is valid during daytime only.
•Treat bearings with caution if the needle wanders and the signal fades.
•Cross-check NDB bearing information against other navigation aids.
98
Automatic Direction Finder (ADF) |
|
7 |
|
||
|
|
|
Station Interference
Due to congestion of stations in the LF and MF bands, the possibility of interference from stations on or near the same frequency exists. This will cause bearing errors. By day, the use of an NDB within the DOC will normally afford protection from interference. However, at night, one can expect interference even within the DOC because of sky wave contamination from stations out of range by day. Therefore positive identification of the NDB at night should always be carried out.
Mountain Effect
Mountainous areas can cause reflections and diffraction of the transmitted radio waves to produce errors in ADF systems. These errors will increase at low altitude and can be minimized by flying higher.
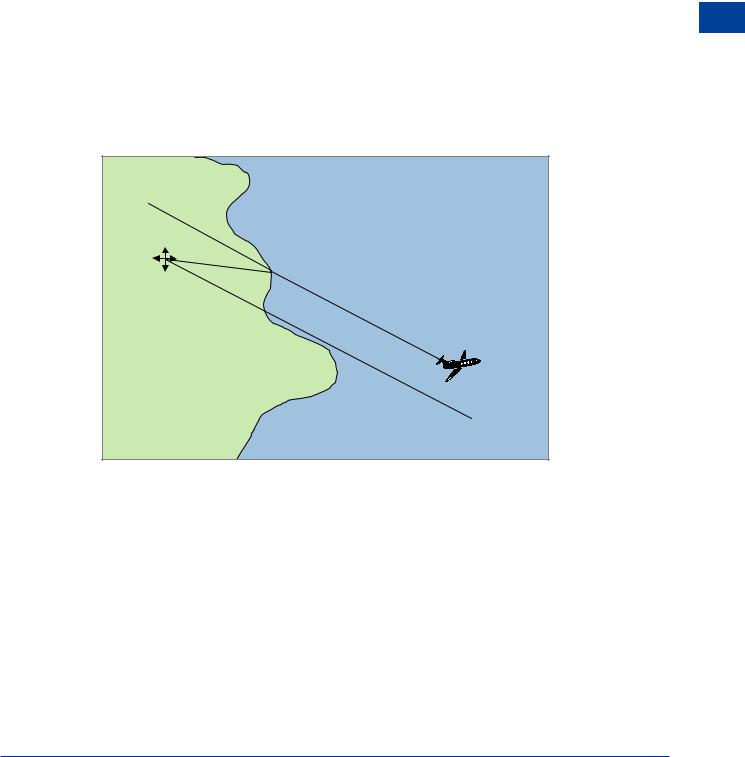
Coastal Refraction
Radio waves speed up over water due to the reduced absorption of energy (attenuation) compared to that which occurs over land. This speeding up causes the wave front to bend (refract) away from its normal path and pull it towards the coast. Refraction is negligible at 90° to the coast but increases as the angle of incidence increases.
Figure 7.22 Coastal refraction
For an aircraft flying over the sea the error puts the aircraft position closer to the coast than its actual position.
The effect can be minimised by:
•Using NDBs on or near to the coast.
•Flying higher.
•Using signals that cross the coast at or near to 90°
Automatic Direction Finder (ADF) 7
99