

Определение передаточных звеньев группы звеньев
Если известна W(s) каждого элемента, то как найти ПФ соединения элементов?


П Ф
1 группы:
Ф
1 группы:
![]()
2
группы
![]()
3
группы
![]() “+”
для отрицательной обратной связи
“+”
для отрицательной обратной связи
“-“ для положительной обратной связи
![]()

Передаточные функции сау
Предположим, что мы имеем структурную схему

W0 – ПФ объекта управления
Передаточная функция САУ в разомкнутом состоянии
![]()
Передаточная функция САУ в режиме управления
![]()
Передаточная функция САУ в режиме стабилизации
![]()


Передаточная функция САУ по ошибке
![]()

Математическа модель через ПФ
![]()
![]() -
учет ненулевых условий
-
учет ненулевых условий
[1+KW(s)]Xвых(s)
= WрегW0G(s)+Wf(s)+R(0)
(S)
х(s)




1+KW(s) = (S) - главный определитель системы
x(s) - частный определитель системы
Характеристическое уравнение САУ в замкнутом состоянии

Полюса – такие значения ???, где функция обращается в 0 или ∞
Примечание:
ХУ САУ в разомкнутом состоянии
i![]()


Число корней в замкнутом и разомкнутом состоянии одно и то же.
Переходная функция системы

h(t) – переходная функция – реакция системы на единичное ступенчатое воздействие

tпп – время переходного процесса – то время, после которого, гафик, попав в трубку точности, больше из нее не выходит.
Хвых(s) = W(s)s-1 = H(s)
H(s) – изображение переходной функции
Вид переходной функции определяет характер и вид переходного процесса
Форма и характер переходного процесса:
-
Монотонный
-
Колебательный периодический.
-
Колебательный апериодический.
Степень колебательности
Перерегулирование


Режим стабилизации



Импульсная переходная функция
Хвх = 1’[t] – единичный импульс

Kи(t) – реакция системы на единичный ступенчатый импульс
Импульсная функция – оригинал от передаточной функции

Импульсная переходная функция – дифференциал от переходной функции.

Определение реакции на воздействие произвольного типа


Интеграл
Дюамеля !!!


ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
САУ


= Аsint = B()sin[t+φ(ω)]

А =const
АЧХ ω = var

φ(ω)
ФЧХ

Чем шире полоса пропускания, тем tпп меньше
пп – полоса пропускания
рез – резонансная частота

Объединение характеристик на комплексной плоскости



Предположим, дано уравнение в операторной форме
D(p) Xвых = M(p) Хвх
Пусть: Хвх = Аsint = J m Aejωt
Тогда: Хвых = B()sint[t+φ(ω)] = J m B()ej[t+φ(ω)]
Преобразования Фурье
p = j




т.е. D(j)B()ejωt ej φ(ω) = M(j)Aejωt


![]()

![]()

Основные свойства АФЧХ
1.
![]()
2. Частотная характеристика есть функция комплексного переменного
![]()
![]()
Номограммы
замыкания![]()
![]()

![]()
3. Обратная ЧХ (иногда удобна)
![]()
4. Интеграл Фурье



5. Пусть есть передаточная функция
Все
i
иi
“левые”

а
Один
к “правый”![]()
б )
)
![]()

Фазовые сдвиги всегда меньше, если все нули левые => минимально фазовая система (МФС)
Все ЧХ находятся в однозначной зависимости в МФС
М Ф
САУ R(ω)
φ
(ω)
Ф
САУ R(ω)
φ
(ω)


P(ω) Q(ω)
6. ЧХ для отрицательного диапазона частот – зеркальное отображение для положительного диапазона частот

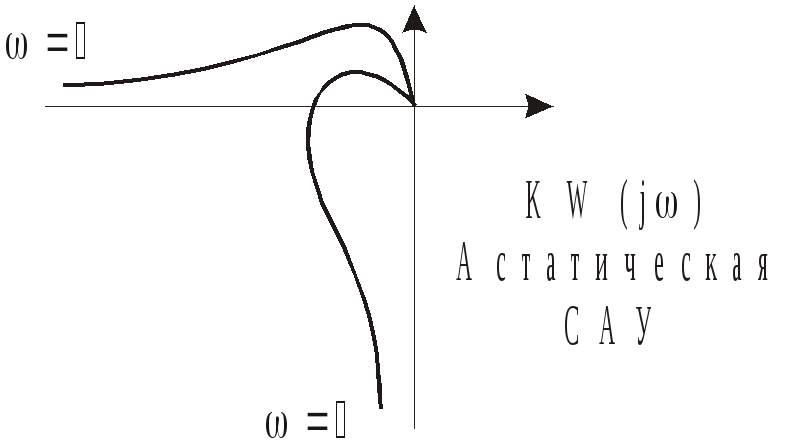
7. Условие физической реализуемости



Если система статичная, то ЧХ должна начинаться из нуля

Если система астатичная, то ЧХ начинается из бесконечности
8. ЧХ группы соединенных элементов



ВЕКТОР !!! Речь идет именно о векторах.
U() – действительная частотная характеристика САУ в разомкнутом состоянии
P() – действительная частотная характеристика САУ в замкнутом состоянии
V() – мнимая частотная характеристика САУ в разомкнутом состоянии

![]()

3
ЛОГАРИФМИЧЕСКИЕ ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
ЛАЧХ![]()


ЛФЧХ 0 1
2 3 4 5 6 7 8 9 10
20 30 декада октава октава декада октава 5 -5 дБ
L() lg(ω) ω![]()











![]()
![]()
![]()
![]()
Изменение частоты в 2 раза - октава
![]()





![]()
![]()


сопр – частота сопряжения
ср – частота среза
При последовательном соединении:






![]() Динамические
характеристики САУ
Динамические
характеристики САУ
[1]
Ст. 42-54