

20
Разложение вектора по базису.
Определение.
Пусть
![]() –
произвольный вектор,
–
произвольный вектор,
![]() –
произвольная система
векторов. Если выполняется равенство
–
произвольная система
векторов. Если выполняется равенство
![]() ,
(1)
,
(1)
то
говорят, что вектор
представлен
в виде линейной комбинации данной
системы
векторов. Если данная система
векторов
является
базисом векторного
пространства, то равенство
(1) называется разложением вектора
по
базису
.
Коэффициенты линейной комбинации
![]() называются
в этом случае координатами вектора
относительно
базиса
.
называются
в этом случае координатами вектора
относительно
базиса
.
Теорема. (О разложении вектора по базису.)
Любой вектор векторного пространства можно разложить по его базису и притом единственным способом.
Доказательство.
1) Пусть L произвольная прямая (или ось)
и
![]() –
базис
–
базис
![]() .
Возьмем произвольный вектор
.
Возьмем произвольный вектор
![]() .
Так как оба вектора
.
Так как оба вектора
![]() и
и
![]() коллинеарные
одной и той же прямой
L, то
коллинеарные
одной и той же прямой
L, то
![]() .
Воспользуемся теоремой о коллинеарности
двух
векторов. Так как
.
Воспользуемся теоремой о коллинеарности
двух
векторов. Так как
![]() ,
то найдется (существует) такое число
,
то найдется (существует) такое число
![]() ,
что
,
что
![]() и
тем самым мы получили разложение вектора
по
базису
векторного
пространства
.
и
тем самым мы получили разложение вектора
по
базису
векторного
пространства
.
Теперь докажем единственность такого разложения. Допустим противное. Пусть имеется два разложения вектора по базису векторного пространства :
и
![]() ,
где
,
где
![]() .
Тогда
.
Тогда
![]() и
используя закон дистрибутивности,
получаем:
и
используя закон дистрибутивности,
получаем:
![]() .
.
Так как
,
то из последнего равенства следует, что
![]() ,
ч.т.д.
,
ч.т.д.
2) Пусть
теперь Р произвольная плоскость
и
![]() –
базис
–
базис
![]() .
Пусть
.
Пусть
![]() произвольный
вектор этой плоскости. Отложим все три
вектора от какой-нибудь одной точки
этой плоскости. Построим 4 прямых.
Проведем прямую
произвольный
вектор этой плоскости. Отложим все три
вектора от какой-нибудь одной точки
этой плоскости. Построим 4 прямых.
Проведем прямую
![]() ,
на которой лежит вектор
,
на которой лежит вектор
![]() ,
прямую
,
прямую
![]() ,
на которой лежит вектор
,
на которой лежит вектор
![]() .
Через конец вектора
проведем
прямую
параллельную вектору
и
прямую параллельную вектору
.
Эти 4 прямые
высекают параллелограмм. См. ниже рис.
3. По правилу параллелограмма
.
Через конец вектора
проведем
прямую
параллельную вектору
и
прямую параллельную вектору
.
Эти 4 прямые
высекают параллелограмм. См. ниже рис.
3. По правилу параллелограмма
![]() ,
и
,
и
![]() ,
,
![]() ,
–
базис
,
,
–
базис
,
![]() –
базис
.
–
базис
.
Теперь,
по уже доказанному в первой
части
этого доказательства, существуют такие
числа
![]() ,
что
,
что
![]() и
и
![]() .
Отсюда получаем:
.
Отсюда получаем:
![]() и
возможность разложения по базису
доказана.
и
возможность разложения по базису
доказана.
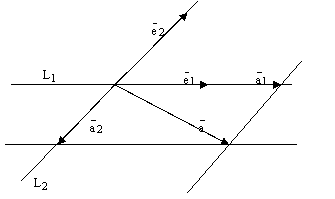
рис.3.
Теперь
докажем единственность разложения по
базису. Допустим противное. Пусть имеется
два разложения вектора
по
базису
векторного
пространства
:
![]() и
и
![]() .
Получаем равенство
.
Получаем равенство
![]() ,
откуда следует
,
откуда следует
![]() .
Если
.
Если
![]() ,
то
,
то
![]() ,
а т.к.
,
а т.к.
![]() ,
то
,
то
![]() и
коэффициенты разложения равны:
и
коэффициенты разложения равны:
![]() ,
,
![]() .
Пусть теперь
.
Пусть теперь
![]() .
Тогда
.
Тогда
![]() ,
где
,
где
![]() .
По теореме о коллинеарности двух
векторов
отсюда следует, что
.
По теореме о коллинеарности двух
векторов
отсюда следует, что
![]() .
Получили противоречие условию теоремы.
Следовательно,
и
,
ч.т.д.
.
Получили противоречие условию теоремы.
Следовательно,
и
,
ч.т.д.
3) Пусть
![]() –
базис
–
базис
![]() и
пусть
и
пусть
![]() произвольный
вектор. Проведем следующие построения.
произвольный
вектор. Проведем следующие построения.
Отложим
все три базисных вектора
![]() и
вектор
от
одной точки и построим 6 плоскостей:
плоскость, в которой лежат базисные
векторы
и
вектор
от
одной точки и построим 6 плоскостей:
плоскость, в которой лежат базисные
векторы
![]() ,
плоскость
,
плоскость
![]() и
плоскость
и
плоскость
![]() ;
далее через конец вектора
проведем
три плоскости
параллельно только что построенным
трем плоскостям. Эти 6 плоскостей
высекают параллелепипед:
;
далее через конец вектора
проведем
три плоскости
параллельно только что построенным
трем плоскостям. Эти 6 плоскостей
высекают параллелепипед:
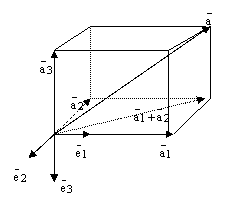
рис.4.
По правилу сложения векторов получаем равенство:
![]() .
(1)
.
(1)
По
построению
![]() .
Отсюда, по теореме о коллинеарности
двух
векторов, следует, что существует число
.
Отсюда, по теореме о коллинеарности
двух
векторов, следует, что существует число
![]() ,
такое что
,
такое что
![]() .
Аналогично,
и
.
Аналогично,
и
![]() ,
где
,
где
![]() .
Теперь, подставляя эти равенства в (1),
получаем:
.
Теперь, подставляя эти равенства в (1),
получаем:
![]() (2)
(2)
и возможность разложения по базису доказана.
Докажем единственность такого разложения. Допустим противное. Пусть имеется два разложения вектора по базису :
и
![]() .
Тогда
.
Тогда
![]() .
(3)
.
(3)
Заметим, что по условию векторы некомпланарные, следовательно, они попарно неколлинеарные.
Возможны два случая: или .
а) Пусть , тогда из равенства (3) следует:
![]() .
(4)
.
(4)
Из равенства
(4) следует, что вектор
раскладывается
по базису
![]() ,
т.е. вектор
лежит
в плоскости
векторов
и,
следовательно, векторы
компланарные,
что противоречит условию.
,
т.е. вектор
лежит
в плоскости
векторов
и,
следовательно, векторы
компланарные,
что противоречит условию.
б) Остается
случай
,
т.е.
![]() .
Тогда из равенства (3) получаем
.
Тогда из равенства (3) получаем
![]() или
или
![]() .
(5)
.
(5)
Так как
–
базис
пространства
векторов
лежащих в плоскости, а мы уже доказали
единственность разложения по базису
векторов
плоскости, то из равенства (5) следует,
что
и
![]() ,
ч.т.д.
,
ч.т.д.
Теорема доказана.
Координаты вектора в данном базисе находятся путем решения системы линейных уравнений
k1*a1 + k2*a2 + k3*a3 + k4*a4 = x
( k1,k2,k3,k4,…,kn ) - и будут координаты вектора х в этом базисе.
21
Разобравшись с нюансами возможных разновидностей векторных пространств, продолжим изучение их структуры, независимой от типа полей, над которыми они бывают заданы.
Мы уже усвоили что такое размерность векторного пространства и его базис.
Ясным
представляется то, что пространство
![]() является
конечномерным,
если количество векторов в его базисе
(или, что то же самое, количество линейно
независимых векторов в системе векторов
является
конечномерным,
если количество векторов в его базисе
(или, что то же самое, количество линейно
независимых векторов в системе векторов
![]() ,
его порождающей) конечно и бесконечномерным
в обратном случае, аналогичное верно и
по отношению к счётномерности\несчётномерности.
,
его порождающей) конечно и бесконечномерным
в обратном случае, аналогичное верно и
по отношению к счётномерности\несчётномерности.
Заметим, что наличие в любого дополнительного числа линейно зависимых векторов никак не повлияет на размер его линейной оболочки, который определяется исключительно линейно независимым базисом.
Конечно, представить себе пространство бесконечной размерности вряд ли получится, однако с чисто математической (логической) точки зрения в нём нет никаких противоречий. Более того, как мы увидим позже, оно успешно применяется при анализе функций.
Подобно
прочим системам векторов, с базисом мы
можем проделывать те же самые действия:
убирать из него какие-то векторы, а
какие-то добавлять, заменять одни другими
и т.п. При этом должно быть понятно, что
базис, состоящий из
![]() элементов
может быть базисом
лишь для
мерного
векторного пространства, и наоборот.
элементов
может быть базисом
лишь для
мерного
векторного пространства, и наоборот.
Вообще говоря, не стоит рассматривать базис как нечто единственное и незыблемое. В зависимости от того, как нам удобнее, мы можем выбирать различные базисы для записи одних и тех же фигур и выражений.
Например,
воспользуемся пространством
![]() с
базисом
с
базисом
![]() Рассмотрим
обыкновенный вектор, заданный в этом
пространстве:
Рассмотрим
обыкновенный вектор, заданный в этом
пространстве:
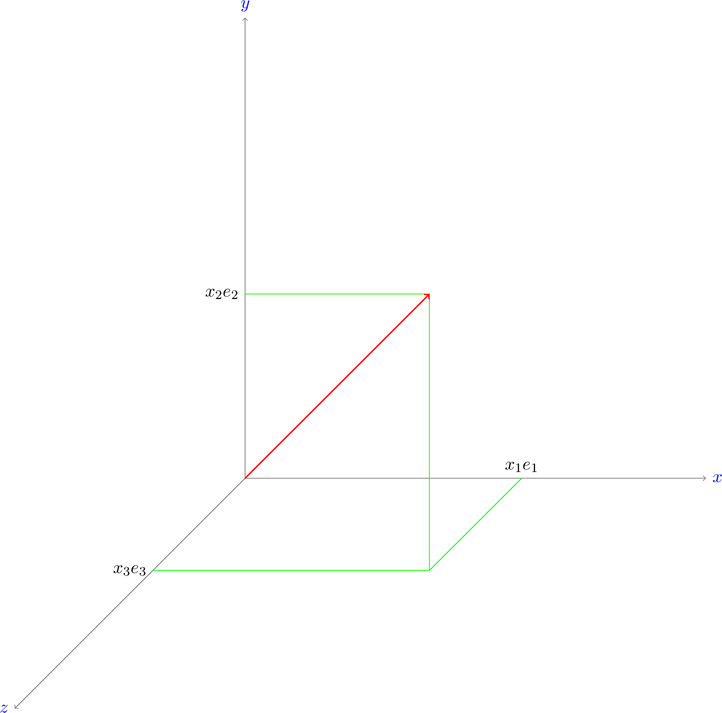
Как
наглядно видно благодаря нашим стильным
зелёненьким вспомогательным
линиям-перпендикулярам, наш вектор
задаётся суммой
![]() Предположим,
что нам понадобилось перейти к другому
базису
Предположим,
что нам понадобилось перейти к другому
базису
![]() (например,
чтобы нагляднее сравнить наш вектор с
какими то другими фигурами). В этом
случае место коэффициентов
(например,
чтобы нагляднее сравнить наш вектор с
какими то другими фигурами). В этом
случае место коэффициентов
![]() займут,
соответственно, те элементы, на которые
надо домножить новые
орты, чтобы получить векторы, равные
изначальным,
т.е. требуется найти такой
займут,
соответственно, те элементы, на которые
надо домножить новые
орты, чтобы получить векторы, равные
изначальным,
т.е. требуется найти такой
![]() ,
что
,
что
![]() Сделать
это крайне просто, достаточно
воспользоваться законами умножения.
Сделать
это крайне просто, достаточно
воспользоваться законами умножения.
Формализуя
данную мысль, отметим, что мы, по сути,
имеем дело с тремя
матрицами
коэффициентов: начальной матрицей
![]() ,
новой матрицей
,
новой матрицей
![]() и
некоторой
и
некоторой
![]() ,
называемой матрицей
перехода
к новому базису. Элементы этой самой
матрицы перехода всего-навсего показывают
на что нам нужно домножить новые
коэффициенты, чтобы получить старые.
Строго говоря:
,
называемой матрицей
перехода
к новому базису. Элементы этой самой
матрицы перехода всего-навсего показывают
на что нам нужно домножить новые
коэффициенты, чтобы получить старые.
Строго говоря:

Изложенные идеи сложны исключительно с технической стороны, даже опытные математики могут периодически путаться при выполнении каких-то подобных расчётов, хотя с научной точки зрения польза заданий такого типа весьма сомнительна.
Итак,
вообразим, что у нас есть «обычный»
ортонормированный базис
Соответственно,
каждый из этих ортов имеет следующие
координаты в базисе:
![]() Видно,
что по каждой оси отложено по одной
единице. Продолжая фантазировать,
вообразим другой базис
Видно,
что по каждой оси отложено по одной
единице. Продолжая фантазировать,
вообразим другой базис
![]() который,
для простоты, будет «удвоенным» первым,
т.е. каждый орт будет в два раза больше
своего «коллеги» из первого базиса.
Конечно, если нас попросят записать
координаты
который,
для простоты, будет «удвоенным» первым,
т.е. каждый орт будет в два раза больше
своего «коллеги» из первого базиса.
Конечно, если нас попросят записать
координаты
![]() в
первом базисе, то мы сразу же это сделаем:
в
первом базисе, то мы сразу же это сделаем:
![]() .
.
Однако, если нам потребуется сделать аналогичное не для всего базиса, но и для случайных векторов, то разумно будет воспользоваться матрицей перехода. Искомая будет представлять собой три столбца, каждый из которых является координатами нового орта в старом базисе:

Как
несложно проверить, соблюдается равенство
![]() ,
здесь базис в матричном виде мы не
записали лишь чтобы не усложнять и без
того громоздкую статью дополнительными
переменными. В удобстве использования
теперь
легко убедиться, чисто механически
переводя координаты любых векторов из
в
наш «оригинальный» базис
,
здесь базис в матричном виде мы не
записали лишь чтобы не усложнять и без
того громоздкую статью дополнительными
переменными. В удобстве использования
теперь
легко убедиться, чисто механически
переводя координаты любых векторов из
в
наш «оригинальный» базис
![]() по
уже указанной выше формуле.
по
уже указанной выше формуле.
Читатель вероятно задаст вопрос: а зачем нужны все эти матрицы перехода? Отвечаем любопытному читателю: есть множество разновидностей стандартных матриц перехода, позволяющих делать типовые операции вроде поворота векторов на соответствующие углы, во-первых, быстро и чётко, а, во-вторых, без того, чтобы прибегать к вспомогательным рисункам.
Координаты вектора в новом базисе имеют вид:
22
Базисным минором матрицы называется любой её ненулевой минор максимального порядка. Для того чтобы минор был базисным, необходимо и достаточно, чтобы все окаймляющие его миноры (то есть содержащие его миноры на единицу большего порядка) были равны нулю. Система строк (столбцов) матрицы, связанных с базисным минором, является максимальной линейно независимой подсистемой системы всех строк (столбцов) матрицы.
Рангом системы строк (столбцов) матрицы A с m строк и n столбцов называется максимальное число линейно независимых строк (столбцов). Несколько строк (столбцов) называются линейно независимыми, если ни одна из них не выражается линейно через другие. Ранг системы строк всегда равен рангу системы столбцов, и это число называется рангом матрицы.
Ранг матрицы — наивысший из порядков миноров этой матрицы, отличных от нуля.
Метод окаймляющих миноров
Пусть в матрице A найден ненулевой минор k-го порядка M. Рассмотрим все миноры (k + 1)-го порядка, включающие в себя (окаймляющие) минор M; если все они равны нулю, то ранг матрицы равен k. В противном случае среди окаймляющих миноров найдется ненулевой, и вся процедура повторяется.
Рангом системы строк (столбцов) матрицы A с m строк и n столбцов называется максимальное число линейно независимых строк (столбцов). Несколько строк (столбцов) называются линейно независимыми, если ни одна из них не выражается линейно через другие. Ранг системы строк всегда равен рангу системы столбцов, и это число называется рангом матрицы.
Ранг матрицы — наивысший из порядков миноров этой матрицы, отличных от нуля.
Ранг матрицы — Размерность образа dim(im(A)) линейного оператора, которому соответствует матрица.
Обычно
ранг матрицы A
обозначается
![]() (
(![]() )
или
)
или
![]() .
.
Пусть
![]() —
прямоугольная матрица.
—
прямоугольная матрица.
Тогда по определению рангом матрицы A является:
ноль, если A — нулевая матрица;
число
 ,
где Mr —
минор матрицы A
порядка r,
а Mr
+ 1 —
окаймляющий к нему минор порядка (r
+ 1), если они существуют.
,
где Mr —
минор матрицы A
порядка r,
а Mr
+ 1 —
окаймляющий к нему минор порядка (r
+ 1), если они существуют.
-
Теорема (о корректности определения рангов). Пусть все миноры матрицы порядка k равны нулю (Mk = 0). Тогда
 ,
если они существуют.
,
если они существуют.
Ранг
![]() матрицы
M
размера
матрицы
M
размера
![]() называют
полным,
если
называют
полным,
если
![]() .
.
23
Теорема о базисном миноре. Столбцы матрицы А, входящие в БМ, образуют линейно независимую систему. Любой столбец матрицы А линейно выражается через столбцы из БМ.
Доказательство.
Предположим противное - система длинных
столбцов линейно зависима
![]() система
коротких столбцов (входящих в длинные)
система
коротких столбцов (входящих в длинные)
![]() линейно
зависима (
линейно
зависима (![]() по свойству определителя
по свойству определителя
![]() БМ
= 0.
Противоречие, т.к. БМ
БМ
= 0.
Противоречие, т.к. БМ![]() .
.
Без ограничения общности считаем, что базисный минор расположен в левом верхнем углу. Покажем, что i-ый столбец линейно выражается через столбцы из БМ. i > r (иначе он сам является столбцом из БМ). Рассмотрим минор порядка на один больше, он будет нулевой.
Фиксируем
![]() .
Раскладываем определитель по j-ой
строке:
.
Раскладываем определитель по j-ой
строке:
![]() так
как минор порядка (r
+ 1) - нулевой
(где M0
- БМ
так
как минор порядка (r
+ 1) - нулевой
(где M0
- БМ
![]() .
Выражаем aj,i:
.
Выражаем aj,i:
![]() Получены
коэффициенты α1,...,αr.
Для любого k:
Получены
коэффициенты α1,...,αr.
Для любого k:
![]() (так
как k
- любое)
(так
как k
- любое)
Следствие.
Если все
столбцы матрицы А линейно выражаются
через r столбцов
![]() ,
которые образуют линейно независимую
систему, то rA
= r.
,
которые образуют линейно независимую
систему, то rA
= r.
Доказательство.
Столбцы входящие в максимальную линейно
независимую систему (в кол-ве rA
штук) линейно выражаются через
![]() .
столбцы
(в
кол-ве r штук) линейно выражаются через
максимальную линейно независимую
систему в кол-ве
.
столбцы
(в
кол-ве r штук) линейно выражаются через
максимальную линейно независимую
систему в кол-ве
![]() .
.
24
Теорема о ранге матрицы. Ранг матрицы А равен максимальному числу линейно независимых столбцов (или равен рангу системы столбцов матрицы А).
Доказательство.
Пусть
![]() -
столбцы, не входящие в БМ и они -
максимальная линейно независимая
система. ранг системы столбцов =
m
(число столбцов входящих в максимальную
линейно независимую систему )
по
утверждению 1 (если система линейно
независима (количество k)
и выражается через другую (количество
l)
то
-
столбцы, не входящие в БМ и они -
максимальная линейно независимая
система. ранг системы столбцов =
m
(число столбцов входящих в максимальную
линейно независимую систему )
по
утверждению 1 (если система линейно
независима (количество k)
и выражается через другую (количество
l)
то
![]() )
)
![]() .
по утверждению 1 и утверждению 2 (все
максимальные линейно независимые
системы состоят из одного и тогоже числа
столбцов) и в силу того, что все столбцы
линейно выражаются через столбцы
максимальной линейно независимой
системы
.
по утверждению 1 и утверждению 2 (все
максимальные линейно независимые
системы состоят из одного и тогоже числа
столбцов) и в силу того, что все столбцы
линейно выражаются через столбцы
максимальной линейно независимой
системы
![]()
25
Существует несколько методов нахождения ранга матрицы:
Метод элементарных преобразований
Ранг матрицы равен числу ненулевых строк в матрице после приведения её к ступенчатой форме при помощи элементарных преобразований над строками матрицы.
Метод окаймляющих миноров
Пусть в матрице A найден ненулевой минор k-го порядка M. Рассмотрим все миноры (k + 1)-го порядка, включающие в себя (окаймляющие) минор M; если все они равны нулю, то ранг матрицы равен k. В противном случае среди окаймляющих миноров найдется ненулевой, и вся процедура повторяется.
26
1.7. Исследование систем линейных уравнений
Исследовать систему линейных уравнений – означает определить, какой является эта система – совместной или несовместной, и в случае её совместности выяснить, определённая эта система или неопределённая.
Условие совместности системы линейных уравнений даёт следующая теорема
Теорема 1.12 (Кронекера–Капелли).
Система линейных уравнений совместна тогда и только тогда, когда ранг основной матрицы системы равен рангу её расширенной матрицы:
![]()
Для совместной системы линейных уравнений вопрос о её определённости или неопределённости решается с применением следующих теорем.
Теорема 1.13. Если ранг основной матрицы совместной системы равен числу неизвестных, то система является определённой
Теорема 1.14. Если ранг основной матрицы совместной системы меньше числа неизвестных, то система является неопределённой.
Таким
образом, из сформулированных теорем
вытекает способ исследования систем
линейных алгебраических уравнений.
Пусть n
– количество неизвестных,
![]()
![]() Тогда:
Тогда:
1)
при
![]() система
несовместна;
система
несовместна;
2)
при
![]() система
совместна, причём, если
система
совместна, причём, если
![]() ,
система определённая; если же
,
система определённая; если же
![]() ,
система неопределённая.
,
система неопределённая.
Определение 1.34. Базисным решением неопределённой системы линейных уравнений называют такое её решение, в котором все свободные неизвестные равны нулю.
Кронекера-Капелли, теорема. Доказательство.
Необходимость
Пусть
система
совместна. Тогда существуют числа
![]() такие,
что
такие,
что
![]() .
Следовательно, столбец b
является линейной комбинацией столбцов
.
Следовательно, столбец b
является линейной комбинацией столбцов
![]() матрицы
A.
Из того, что ранг матрицы не изменится,
если из системы его строк (столбцов)
вычеркнуть или приписать строку
(столбец), которая является линейной
комбинацией других строк (столбцов)
следует, что
матрицы
A.
Из того, что ранг матрицы не изменится,
если из системы его строк (столбцов)
вычеркнуть или приписать строку
(столбец), которая является линейной
комбинацией других строк (столбцов)
следует, что
![]() .
.
Достаточность
Пусть
![]() .
Возьмем в матрице A
какой-нибудь базисный минор. Так как
.
Возьмем в матрице A
какой-нибудь базисный минор. Так как
![]() ,
то он же и будет базисным минором и
матрицы B.
Тогда согласно теореме о базисном миноре
последний столбец матрицы B
будет линейной комбинацией базисных
столбцов, то есть столбцов матрицы A.
Следовательно, столбец свободных членов
системы является линейной комбинацией
столбцов матрицы A.
,
то он же и будет базисным минором и
матрицы B.
Тогда согласно теореме о базисном миноре
последний столбец матрицы B
будет линейной комбинацией базисных
столбцов, то есть столбцов матрицы A.
Следовательно, столбец свободных членов
системы является линейной комбинацией
столбцов матрицы A.
27
Алгоритм решения линейной неоднородной системы уравнений.
Исследование на совместность. Если Rg A = Rg A с полоской сверху =>
Выделение базисного минора. Пусть Б.М. расположен в левом верхнем углу, тогда первые r строк явл. строками Б.М. Все остальные линейно выражаются через первые r.
Если r=m, то Mr =det A ≠ 0 По теореме Крамера система совместна и имеет реш-я.
Если r<m, то оставляем только неизвестные из Б.М. и объявл. их главными. Остальные переносим в правую часть. Это свободные переменные
Придадим свободным неизвестным значения (Xn+1=C1, Xn+2=C2,…)
Тогда по правилу Крамера имеем ед. реш-е Bi=Bi-Air+1Cr+1-…-AinCn-r
Найдем решения по т. Крамера (ОРНС)
Если C1=α1 C2=α2 Cn-r=αn-r (ЧРНС)
Х1= F1(B1, α1, α2… αn-r)=β1
.
.
.
(β1)
(β2)
Xч.р.н.с. = (…)
(βn)
28
Однородные системы
Однородной
системой линейных уравнений называется
система вида:

Нулевое
решение
![]() системы
(1) называется тривиальным
решением.
системы
(1) называется тривиальным
решением.
Однородные системы всегда совместны, т.к. всегда существует тривиальное решение.
Если существует любое ненулевое решение системы, то оно называется нетривиальным.
Решения однородной системы обладают свойством линейности:
|
Теорема (о
линейном решении однородных
систем).
Пусть
|
|
Сформулируем теорему, которая позволит дать основное определение:
|
Теорема (о
структуре общего решения).
Пусть
|
Теорема. Однородная система линейных уравнений имеет ненулевое решение тогда и только тогда, когда ее ранг меньше числа неизвестных.
Доказательство:
Допустим, система, ранг которой равен,
имеет ненулевое решение. Очевидно, что
![]() не
превосходит
не
превосходит
![]() .
В случае
.
В случае
![]() система
имеет единственное решение. Поскольку
система однородных линейных уравнений
всегда имеет нулевое решение, то именно
нулевое решение и будет этим единственным
решением. Таким образом, ненулевые
решения возможны только при
система
имеет единственное решение. Поскольку
система однородных линейных уравнений
всегда имеет нулевое решение, то именно
нулевое решение и будет этим единственным
решением. Таким образом, ненулевые
решения возможны только при
![]() .
.
Следствие 1: Однородная система уравнений, в которой число уравнений меньше числа неизвестных, всегда имеет ненулевое решение.
Доказательство:
Если у системы уравнений
![]() ,
то ранг
системы
не превышает числа уравнений
,
то ранг
системы
не превышает числа уравнений
![]() ,
т.е.
,
т.е.
![]() .
Таким образом, выполняется условие
и,
значит, система имеет ненулевое решение.
.
Таким образом, выполняется условие
и,
значит, система имеет ненулевое решение.
Следствие 2: Однородная система уравнений с неизвестными имеет ненулевое решение тогда и только тогда, когда ее определитель равен нулю.
Доказательство:
Допустим, система
линейных
однородных уравнений, матрица которой
![]() с
определителем
с
определителем
![]() ,
имеет ненулевое решение. Тогда по
доказанной теореме
,
а это значит, что матрица
,
имеет ненулевое решение. Тогда по
доказанной теореме
,
а это значит, что матрица
![]() вырожденная,
т.е.
вырожденная,
т.е.
![]() .
.
СВОЙСТВА РЕШЕНИЙ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
1.
Если
столбцы
![]() —
решения однородной системы уравнений,
то любая их линейная комбинация ах
—
решения однородной системы уравнений,
то любая их линейная комбинация ах
![]() также
является решением однородной системы.
также
является решением однородной системы.
2.
Если
ранг матрицы однородной системы равен
![]() ,
то система имеет
,
то система имеет
![]() линейно
независимых решений.
линейно
независимых решений.
Если вектор x является решением однородной системы A·x = 0, то вектор αx также является решением этой системы. Здесь α — произвольное число.
Если векторы x и y являются решениями однородной системы A·x = 0, то вектор x + y также является решением этой системы.
Если вектор x является решением однородной системы A·x = 0, а вектор и y — решение неоднородной системы A·x = b, то вектор x + y является решением неоднородной системы A·x = b.
Если векторы x и y являются решениями неоднородной системы A·x = b, то вектор x − y является решением однородной системы A·x = 0.
Множество решений однородной линейной системы относительно n неизвестных является линейным подпространством пространства Rn. Размерность этого подпространства равна n − r, где r − ранг матрицы системы A.
29
Фундаментальная система решений (ФСР) представляет собой набор линейно независимых решений однородной системы уравнений.
Oбщее решение однородной системы уравнений: