

Теоретико-множественное описание систем
Определение системы:
![]()
![]() - вес i-той компоненты;
- вес i-той компоненты;
I – множество индексов;
Если количество компонент конечно, то получим:
![]()
Причины определенных систем теоретико-множественного пособия:
1)Система определяется в терминах ее наблюдаемых свойств или взаимосвязей этих свойств. При рассмотрении взаимодействий мы не рассматриваем сущность системы и происходящих явлений.
2)Данное определение системы очень общее, но различным системам отвечают различные описания этих систем. Все они могут быть вложены в данное определение
3)Системы часто задаются с помощью некоторый уравнений относительно выбранных параметров. Каждому параметру ставится в соответствие некоторый объект системы, который и определяет область значения этой переменной. Если мы утверждаем, что вся система описывается системой уравнений, относительно множества параметров или переменных, то это говорит о том, что система является отношением над соответствующим объектом. При этом любые колебания элементов этих объектов должны удовлетворять исходной системе уравнений. В данной системе отношение определяется как некоторая декартовая степень подмножества А:
![]()
Для того, чтобы описывать систему, исходя из данного определения, необходимо наделить ее некоторой дополнительной структурой. Это можно сделать 2мя способами:
-
Вводится дополнительная структура для всех элементов , объектов системы.
-
Вводится структура непосредственно для самих объектов системы.
1ый способ приводит к понятию временных систем, а 2ой к понятию алгебраических систем.
Временные и функциональные системы.
1) Функциональная система определяется
так: если элементы 1 из объектов есть
функция, то этот объект называется
функциональным. Если для всех функций
данного объекта V одинаковый,
то каждая функция
![]() является отображением множества Т в
множестве А:
является отображением множества Т в
множестве А:
V: Tv→ Av
Tv – индексирующее множество
А – алфавит объектов
Если Т линейно упорядочено, то его называют множеством момента времени, а функцию, определенную на таком множестве – функцией времени. Объект, элементами которого является временная функция, носит название временного объекта, а система, определенна на временном объекте носят название временных систем.
2) Алгебраическая
Для алгебраической системы объекты наделяются различными математическими структурами путем определения 1 или нескольких операций, для которых объект V становится алгеброй.
Алгебра – либо общий предмет, либо алгебра относящаяся к теории алгебраических операций, либо некая математическая модель.
В простом случае задается бинарная операция:
![]() и предполагается, что в множестве V
любой выделить такое подмножество W,
что любой элемент из множества V
можно получить в рез. применении операции
R к элементам подмножества
W.
и предполагается, что в множестве V
любой выделить такое подмножество W,
что любой элемент из множества V
можно получить в рез. применении операции
R к элементам подмножества
W.
![]()
В этом случае подмножество W называется множество производящих элементов или алфавитом объекта. В этом случае элементы подмножества W называются символами, а элементы V – словами.
Алфавит временных объектов и алфавит алгебраического объекта, если алфавиты конечны, являются 1ми и теми же множествами.
Особый интерес представляют объекты, у которых элементы входных и выходных параметров определяются на 1 и тех же множествах .
Пусть существует множество I,
разделим его на
![]()
Тогда, множество Х, определяется следующим образом:
![]() будем называть входящим объектом, а
множество
будем называть входящим объектом, а
множество![]() .
.
Тогда система
![]() носит название система вход/выход
или система черного ящика.
носит название система вход/выход
или система черного ящика.
Многие понятия ТС можно определить исходя основному определению системы, но для получения существующих результатов необходимо введение дополнительных структур.
Динамическое описание систем.
Данное описание удобно тем, что используется богатый математический аппарат. В данном случае все переменные называются переменными состояния, а пространство, где меняется переменная, называется пространством состояний.
![]()
![]()
![]()
![]()
Rn – n-мерное Эвклидово пространство
x – переменная состояния и определенная на Rn
U – переменная состояния и определенная на Rm
y – переменная состояния и определенная на Rr
Условия существования единственного решения выполняется в том случае, если переменная управления U(t) принадлежит одному из следующих классов функций:
постоянная, кусочно-постоянная, кусочно-непрерывная, кусочно-гладка функция.
Частными случаями динамической системы являются:
линейные системы
x’=Ax+Bu
y =Cx
билинейные системы

Y(t)=Cx(t)
линейно-аналитическая система:
x’(t)=f(x(t))+U(t)g(x(t))
y(t)=Cx(t)
![]() – это для перехода от векторной формы
к матричным преобразованиям.
– это для перехода от векторной формы
к матричным преобразованиям.
![]() – матрица Якоби.
– матрица Якоби.
Минусом динамических систем является отсутствие информации о топологии и структуре системы/модели.
Динамические системы можно представлять нелинейными ДУ:
![]()
i=1,n
![]()
![]()
x – внутренняя переменная системы
f – внешнее воздействие на систему
– смотри нормальную форму Коши
Представление систем с помощью графов
Граф G на множестве вершин X и множестве друг U.
G(X,U)
Uij=(xi,xj),
![]()
Дуга Uj исходя из xi и заходит в xj. Такая дуга становится инцидентной вершинам xi и xj.
Если взять две вершины
![]() ,
и x<y,
то вершина Х предшествует вершине Y,
следовательно y
следует за x.
,
и x<y,
то вершина Х предшествует вершине Y,
следовательно y
следует за x.
Если записано x≤y следовательно x=y или из вершины x в y существует путь.
Дуги называются смежными, если они различны, но имеют 1 общую вершину. Вершины смежные, если они различны и существует дуга из одной вершины в другую.
Некая вершина
![]() ,
которая следует за всеми вершинами
подмножества Y
множества X
называется мажорантой (стоком). Может
существовать несколько мажорант.
,
которая следует за всеми вершинами
подмножества Y
множества X
называется мажорантой (стоком). Может
существовать несколько мажорант.
Вершина
![]() ,
которая предшествует всем вершинам
подмножества Y
множества X
называется минорантой (истоком). Может
существовать несколько минорант.
,
которая предшествует всем вершинам
подмножества Y
множества X
называется минорантой (истоком). Может
существовать несколько минорант.
Для неориентированного графа вводится понятие: локальная степень вершины X – число ребер инцидентных вершине x.
Обозначается:
![]()
Если
![]() четно, то вершина тоже и наоборот.
четно, то вершина тоже и наоборот.
Граф называется однородным степени n,
если локальная степень всех вершин
![]() для любого
для любого
![]() .
.
Для ориентированного графа: множество
дуг, исходящих из вершины xi
записывается
![]() и называются локальной степенью вершины
или полустепень исходящей вершины xi.
и называются локальной степенью вершины
или полустепень исходящей вершины xi.
![]()
Ориентированный граф называется однородным, если все локальные степени имеют одно и тоже значение:
![]() ,
для любого
,
для любого
![]()
Если
![]() ,
то вершина x является
изолированной.
,
то вершина x является
изолированной.
Если
![]() ,
а
,
а
![]() ,
то эта вершина является входом.
,
то эта вершина является входом.
Если
![]() ,
,![]() – вершина является выходом.
– вершина является выходом.
Неориентированный граф является связанным, если любые xi, xj можно соединить цепью, следовательно для ориентированного графа вводятся понятия сильно связанного графа.
Граф сильно связан, если любые xi, xj существуют из xi в xj.
Способы представления графов
1. Матрица смежности
![]()
Для неориентированного графа симметрична. Ее вид зависит от выбора алгебраической нумерации вершин. Для ориентированного их можно подобрать так, что матрица будет треугольной.
Свойства матрицы смежности для ориентированного графа:
-
каждый нулевой столбец соответствует источнику
-
каждая нулевая строка – строку
-
если все элементы главной диагонали равны 0, то в графе нет петель
-
появление единицы для любого xi,j . i=j соответствует петле
-
матрица не симметрична
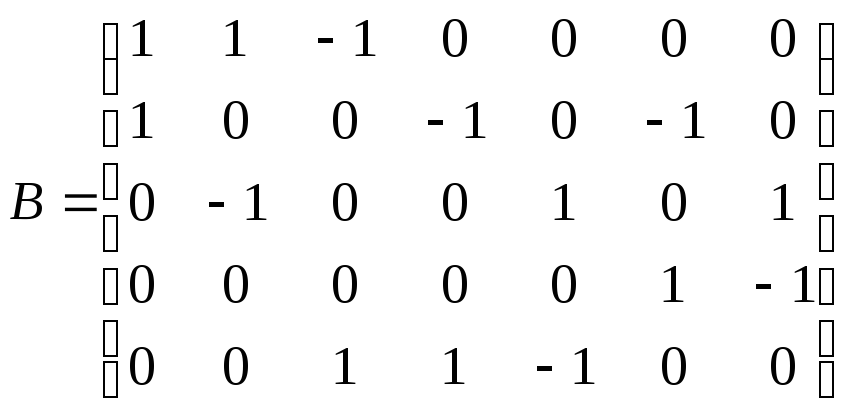
2. Матрица инцидентности
В
![]() неориентированный
неориентированный
в ориентированный
ориентированный
Ребра должны быть пронумерованы!
3. Матрица изоморфности
В строках через запятую представлены номера входных дуг с плюсом и номера с выходом с минусом.
Пример:
 м
м атрица
смежности
атрица
смежности
 матрица
инцидентности
матрица
инцидентности
 матрица
изоморфности
матрица
изоморфности