

Билет №16
1. УРАВНЕНИЯ ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
Уравнение равновесия напряжения. Напряжение на выводах генератора Uвсегда меньше наводимой в обмотке якоря ЭДС Е на значение падения напряжения, т. е.
U = E - IaΣra - ΔUщ.
Падение напряжения в цепи якоря состоит из двух составляющих: IaΣra - падение напряжения в обмотках и ΔUщ. - падение напряжения в щеточном контакте. Сопротивление Σra включает в себя сопротивления обмотки якоря и всех последовательно соединенных с ней обмоток. В общем случае
|
Σra = ra + rд.+ rс + rк, |
(2) |
где ra, rд, rс, rк - сопротивления обмоток: якоря, дополнительных полюсов, последовательной и компенсационной.
В зависимости от конкретной схемы генератора часть сопротивлений в (2) будет отсутствовать.
Уравнение баланса мощностей. Это уравнение получим, если правую и левую части (1) умножим на ток Ia:
|
UIa = EIa. - I2aΣra - ΔUщIa. |
Уравнение равновесия моментов. Поделив правую и левую части уравнения (7) на угловую скорость якоря Ω=2πn/60, получим уравнение момента:
|
P1/Ω = Pэм/Ω + (Pмх.+ Pм + Pд)/Ω, |
(8) |
или
|
М1 = М + (Pмх.+ Pм + Pд)/Ω. |
|
Электромагнитный момент М в генераторе направлен против вращения и равен М=cMIaФ. При увеличении тока Iaвозрастает электромагнитный момент и, следовательно, момент и мощность, поступаемая от приводного двигателя.
2. Пуск асинхронного двигателя с фазным ротором

3. Характеристика холостого хода СГ Эта характеристика представляет собой зависимость ЭДС генератора Е0 на холостом ходу (т.е. без нагрузки) от тока возбуждения IВ. Она связана с кривой намагничивания стали и напоминает ее по форме
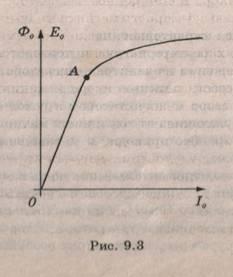
На холостом ходу синхронного генератора его ЭДС создается только главным магнитным потоком, поэтому ЭДС Е0 пропорциональна главному магнитному потоку Ф0, который в свою очередь пропорционален магнитной индукции В0в статоре. Поэтому зависимость Е0 = f(IВ, ) подобна зависимости Во = f(Iв) т.е. первоначальной кривой намагничивания стали.
Билет № 17
1. Классификация двигателей постоянного тока по способу возбуждения
Классификация электродвигателей постоянного тока.
Двигатели делятся по способу коммутации электрообмоток возбуждения.
-
Схемы независимого включения обмоток возбуждения.
-
Схема параллельного включения обмоток возбуждения.
-
Схема последовательноговключения обмоток возбуждения.
-
Схема смешанного включения обмоток возбуждения. На любом электродвигателе постоянного тока, ротор (его подвижная часть) состоит из многих катушек, на одну из которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа катушек необходимо для обеспечения оптимального взаимодействия между магнитными полями ротора и статора.
2. зависимость электромагнитного момента от напряжения
Основными недостатками асинхронных двигателей являются [2]: квадратичная зависимость электромагнитного момента от напряжения, тепловая чувствительность статора и ротора по отношению к напряжению и малый воздушный зазор, несколько снижающий надежность двигателя. АД с фазным ротором менее распространены, чем АД с короткозамкнутым ротором, из-за усложнения конструкции ротора и соответственно меньшей надежности, более высокой цены и усложнения эксплуатации
3.Конструкция СМ
Основными частями синхронной машины являются якорь и индуктор. Наиболее частым исполнением является такое исполнение, при котором якорь располагается на статоре, а на отделённом от него воздушным зазором роторе находится индуктор.
Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора.
Индуктор состоит из полюсов — электромагнитов постоянного тока[1] или постоянных магнитов (в микромашинах). Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При неявнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин с фазным ротором, с той лишь разницей, что между полюсами оставляется место, незаполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса.
Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную конструкцию из электротехнической стали (то есть набранную из отдельных листов). Электротехническая сталь обладает рядом интересных свойств. В том числе она имеет повышенное содержание кремния, чтобы повысить её электрическое сопротивление и уменьшить тем самым вихревые токи.