

37.(21) Динамические характеристики осветительной нагрузки и асинхронного двигателя.
Зависимость параметров режима от времени и изменения других параметров, определенная при столь быстрых изменениях режима, что скорость обязательно должна быть учтена, называется динамической характеристикой. Она представляется в виде функциональной связи какого-либо параметра режима, а также ряда других параметров режима и их производных, например
Р = φ(U, f, dU/dt; d2U/dt2; d2f/dt2; …).
Комплексные характеристики нагрузки состоят из характеристик отдельных ее элементов, к которым относятся:
1. Характеристики осветительной нагрузки.
Зададим возмущение в форме резкого снижения напряжения.
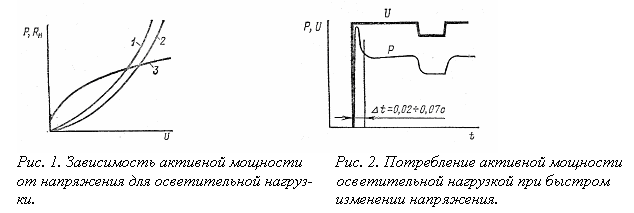
В лампе накаливания существует нить, сопротивление которой зависит от температуры. Включив лампу с холодной нитью из-за малого сопротивления (Р = U2/Rn) происходи всплеск активной мощности. Для лампы зависимость P(t) обусловлена изменением сопротивления нити от температуры.
2. Характеристика двигательной нагрузки.
Факторы, влияющие на динамические характеристики нагрузки:
- изменение активного сопротивления от температуры;
- изменение индуктивности в двигателе в соответствии со скоростью вращения ротора;
- изменение механической нагрузки двигателя при изменении скольжения;
- инертность ротора вместе с механизмом.
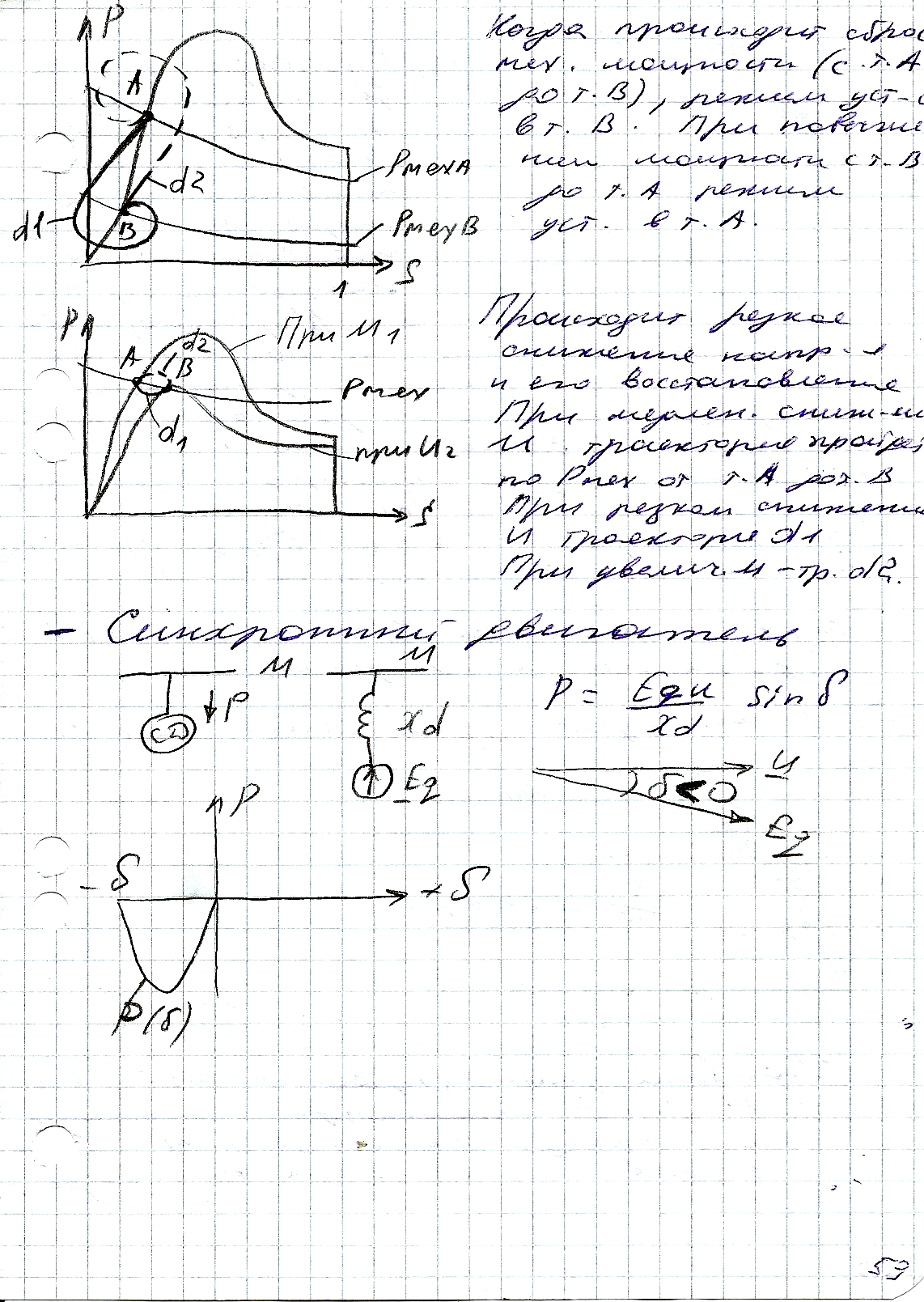
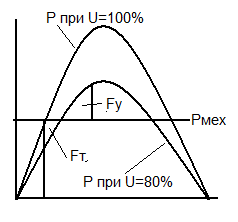
Когда происходит сброс механической мощности (с т.А до т.В) режим устанавливается в точке В. При повышении мощности с т.В до т.А режим устанавливается в точке А.
Происходит резкое снижение напряжения и его восстановление. При медленном снижении напряжения траектория пройдет по Рмех от т.А до т.В. При резком снижении напряжения траектория d1. При увеличении напряжения – траектория d2.
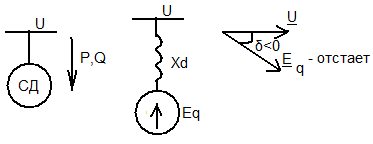
38.(22) Динамические характеристики сд
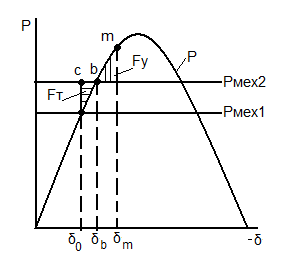
39.(20) Динамическая устойчивость сд
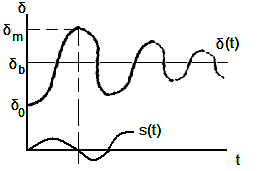
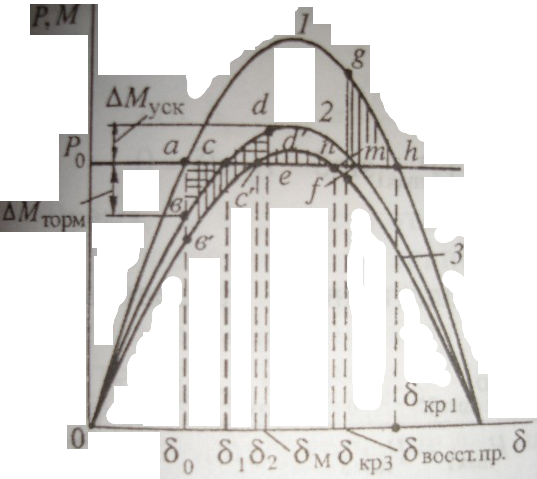
Предположим, что двигатель снабжен АРВ пропорционального типа. Тогда он может быть представлен X’d и ЭДС E’. Хар-ка мощности двигателя без учета второй гармоники имеет синусоидальный хар-р (кривая 1). При уменьшении напряжения на зажимах двигателя рабочая точка перемещается на хар-ку мощности, соотв новому режиму (т. b на хар-ке 2). При этом на валу двигатель – приводимый механизм возникает тормозной избыточный мом-т ΔМторм, угол δ начинает увеличиваться, а тормозной мом-т уменьшается и становится равным 0 в точке с. Кинетическая энергия, запасенная ротором двигателя при его движении от т. b к т. с (величина ее пропорциональна abc), не позволит ротору останавливаться в точке нового устойчивого равновесия с. Угол δ будет увеличиваться до тех пор, пока площадь cde не станет равной площади abc. Точка d соотв-ет максимальному углу отклонения оси ротора от своего первоначального положения δ0.
В точке d скорость вращения ротора становиться синхронной, но поскольку на вал двигателя действует избыточный момент ΔМуск, ротор начинает двигаться в сторону точки с. Около нее возникают затухающие колебания, аналогичные при внезапном откл линии.
Рассмотренное снижение напр-ия (хар-ка 2) не нарушает статической устойчивости двигателя, он может нормально работать на пониженном напряжении, но с меньшим запасом статической устойчивости. Если хар-ка мощности располагается так, что максимальный угол отключения ротора превышает критическое значение δкр.з. (хар-ка 3), на валу двигателя возникает тормозной избыточный мом-т и его устойчивость нарушается. В этом случае для сохранения устойчивости необходимо восстановление напряжения U0 на зажимах двигателя в какой-либо момент времени, соответствующий углу δвосст.
Угловая характеристика
По правилу площадей: Fторм1+Fторм2= Fуск1+Fуск2. FтормΣ≤Fвозм.уск - критерий ДУ СД, или применительно к нашему рисунку: Fab’c’+ Fcc’d’=Fc’d’n+Fmgh