

4.6 Определение уравновешивающей силы с помощью теоремы н.Е. Жуковского о «жестком рычаге»
Построим рычаг
Н.Е. Жуковского для рассматриваемого
положения
![]() .
.
Составим уравнение моментов всех сил относительно полюса.
![]()

Отсюда

Замеряем отрезки на чертеже
![]() pa=100мм,
pg=60мм,
pe=4мм,
pl=40мм,
pk=8мм,
pb=105мм,
ph=52мм,
pd=25мм,
pc=78мм,
pf=16мм,
pn=40мм,
pt=12мм,
pm=35мм.
pa=100мм,
pg=60мм,
pe=4мм,
pl=40мм,
pk=8мм,
pb=105мм,
ph=52мм,
pd=25мм,
pc=78мм,
pf=16мм,
pn=40мм,
pt=12мм,
pm=35мм.

![]() 1356,34
Н.
1356,34
Н.
Сравнение значений уравновешивающей силы, вычисленных двумя способами.
При кинетостатическом
расчете механизма было получено численное
значение уравновешивающей силы
![]() 1295,42
Н.
1295,42
Н.
С помощью рычага
Н.Е. Жуковского получили
![]() 1356,34
Н. Причем, последнее значение за 100%.
Вычислим разницу в процентах.
1356,34
Н. Причем, последнее значение за 100%.
Вычислим разницу в процентах.
![]()
Содержание
-
Определить недостающие числа зубьев Zi колёс из условий соосности, а также – число сателлитов из условия соседства и собираемости. Определить начальные радиусы всех зубчатых колёс; коэффициенты смещения принять равными нулю.
-
Вычертить кинематическую схему механизма и определить стапень его подвижности.
-
Раститать передаточное отношение механизма трения способами (аналитическим, графическим, и силовой). Построить номограмму угловых скоростей звеньев.
Определить усилия в кинематических парах механизма от момента движущих сил Мg на входном валу; момент сил сопротивления Мс определить из условий равновесия звеньев;
Определить величину тормозного момента Мт на неподвижном звене и проверить условия равновесия механизма.
-
Определить геометрические параметры пары нормальных зубчатых колёс; построить схему зацепления нормальных зубчатых колёс, на которой обозначить основные параметры колёс и передачи. На схеме показать схему зацепления (на линии зацепления и на поверхности зубьев),радиальные зазоры. Проверить, располагаются ли активные участки профиля зубьев на эвольвентой части. На схеме зацепления показать не менее четырёх зубьев каждого колеса. Масштаб чертежа выбирать таким, чтобы высота зубьев была не менее 50мм.
-
Выбор коэффициенты смещения исходного производящего контура, обеспечивающие требуемые свойства передачи; построить схему зацепления исправленных колёс. На схеме обозначить все параметры.
1.1)Проектирование кинематического и силового расчёта многозвенного зубчатого механизма.
Исходные данные.
Дано: модуль планетарной ступени m=5. Число зубьев колёс Z1=16; Z3=48;Z5=26;Z6=38;Z7=76;m=5. Z2 и Z4-не заданно.
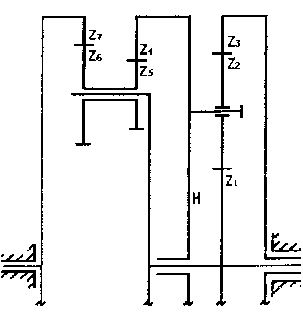
Рис. Схема планетарного зубчатого механизма.
Ведущее звено – колесо 3, ведомое – колесо 7, к колесу 1 приложен момент сопротивления Мс, направленный по часовой стрелки. Мс=250 Нм. Частота вращения ведущего водила nН=1000 оборотов в минуту
Требуется провести
кинематический силовой расчёт определения
мощности на ведущем и ведомом звеном.
Если коэффициент полезного действия
![]() =0,92.
=0,92.
1.2)Определим недостающее число зубьев колеса Z2 и Z4.
Z7 -Z6 =Z4-Z5;
Z4= Z7 -Z6 +Z5;
Z4= 76-38+26=64;
Z1+2*Z2= Z3;
Z2=![]() ;
;
Z2=![]() =16;
=16;
1.3)Определить число сателлитов из условия соседства.
Где m-целое число.
n=![]() ;
n=2;
;
n=2;
m=![]() ;
;
m=![]() =70;
=70;
n=![]() ;
;
m=![]() ;
;
m=![]() =32;
=32;
m-целое число, поэтомуусловие сборки выполняется.
Проверим условия соседства.
Для колеса 7 и 6.
(Z4
-Z5)*sin![]() >
Z5+2;
>
Z5+2;
(64-26)*sin90>28;
38>28
(Z1
+Z2)*sin![]() >Z2+2;
>Z2+2;
(16+16)sin90>18;
38>18;
Условия соседства выполняется.
1.4)Определение предаточного отношения.
Общее передаточное отношение равно.
Uобщ.=U32(1) *U45 *U67=1,33*0,41*2=1,09;
U32(1)=1+![]() ;
U32(1)
=1+
;
U32(1)
=1+![]() =1,33;
=1,33;
U45=-![]() ;
U45=-
;
U45=-![]() =-0,41;
=-0,41;
U67=![]() U67=
U67=![]() =2;
=2;
Передаточное
отношение больше единицы, Uобщ.
![]() 0,следовательно,
ведущее и ведомое калёса вращаются в
одну сторону.
0,следовательно,
ведущее и ведомое калёса вращаются в
одну сторону.
1.5)Силовой расчёт.
Прежде чем начать силовой расчёт, вычислим радиусы начальных окружностей всех колёс, которые по прямому условию, совпадают с делительными окружностями.
ri=![]() ;
;
r1=![]() =40=0,04м
=40=0,04м
r2=![]() =40=0,04м
=40=0,04м
r3=![]() =120=0,12м
=120=0,12м
r4=![]() =160=0,16м
=160=0,16м
r5=![]() =65=0,065м
=65=0,065м
r6=![]() =95=0,095м
=95=0,095м
r7=![]() =190=0,19м
=190=0,19м
Расчёт нагружения колеса 7.
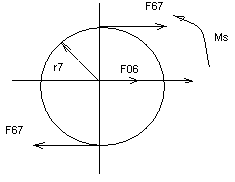
Рис. 2)Схема нагружения колеса 7
Для колеса 7 составляем уравнение.
Находим F67
∑m(F06)=0;
2F67r7-Мs=0;
F67=![]() =
=![]() =657,89Н;
=657,89Н;
Расчёт нагружения колеса 6 и 5.
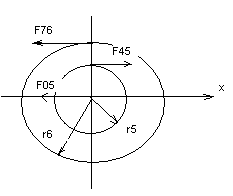
Рис. 3)Схема нагружения колёс 6 и 5.
Находим F45
- F76*r6+F45*r5=0;
F45=![]() ;
F45=
;
F45=![]() =961,53Н;
=961,53Н;
Находим F05
– F76+F45+F05=0;
F05= F76 –F45; F05=657,89-961,53=-303,64Н;
Расчёт нагружения колеса 4 и 5.
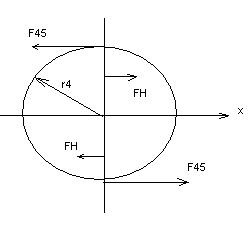
Рис. 4)Схема нагружения колёс 4 и 5.
Находим FН
rн=r1+r2=0,04+0,04=0,08м;
-2F56* r4+2* F54*rн=0;
FН=![]() ;
FН=
;
FН=![]() =1923,06Н;
=1923,06Н;
Расчёт нагружения колеса 2 и 3.
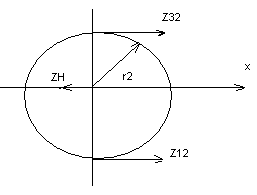
Рис. 5)Схема нагружения колёс 2 и 3.
Z12 =Z32;
-FН+2Z12=0;
Z12=![]() ;
F12=
;
F12=![]() =961,53Н;
=961,53Н;
Расчёт нагружения колеса 1 и 2.
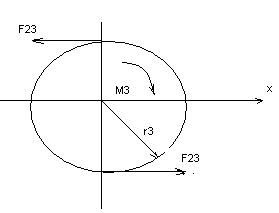
Рис. 3)Схема нагружения колёс 1 и 2.
-2F23*r3+M3=0;
М3=2F23*r3; М3=2*961,53*0,12=230,77Н;
Проверим правельнных вычислений.
Мс=М3*Uобщ.=230,77*1,09=251,54Нм
250≈251,54
В пределах погрешности округлений получили тождество. Значит, расчёт проведён верно.
С учётом потерь на трение движущихся моментов равен величине
М∂=![]() ;
М∂=
;
М∂=![]() =251,54Н;
=251,54Н;