

Федеральное агентство по образованию
филиал Государственного образовательного учреждения
высшего профессионального образования
Московского государственного индустриального университета
в г. Рославле Смоленской обл.
Кафедра «Технология машиностроения»
Курсовая работа
по дисциплине «Теория машин и механизмов»
на тему «Проектирование и исследование Кривошипно-ползункового механизма V-образного двигателя »
Группа 31
Студент ____________ Д.В.Ковалёв
Руководитель работы,
Ст.преподаватель
кафедры «ТМ» ____________ А.Н.Вологин
Допускается к защите
Зав. кафедрой ____________ О.Н. Федонин
Оценка работы ____________
Дата ____________ «___»________
РОСЛАВЛЬ 2011
Задание на курсовой проект
Кривошипно-ползунковый механизм
Кинематическая схема Кривошипно-ползункового механизма V-образного двигателя внутреннего сгорания показана на рис. 1, а в таблице 1 приведены исходные данные для расчета по вариантам. На рисунке обозначено: 1 – кривошип, 2,4 – шатуны, 3,5 – поршни (ползуны), 6 – неподвижная часть механизма – стойка. Стрелкой показано направление угловой скорости ω1.
Точки S2, S4 – центры масс шатунов.
Длины шатунов
одинаковы, т.е.
![]() .
.
В цилиндре В рабочий ход, в цилиндре С – выпуск, Р5=0.
При силовом расчете вес звеньев G2,=G4=G3=G5=0 (не учитывать).
H – полный ход поршня [мм],
Dп – диаметр поршня [мм],
φ1 – угол поворота кривошипа, отсчитываемый от линии ОВ0, соответствующей «мертвому» положению первого поршня,
![]() ,
где r
– длина кривошипа [мм],
,
где r
– длина кривошипа [мм],
![]() - длина шатунов [мм],
- длина шатунов [мм],
s – перемещение поршня от верхней «мертвой» точки [мм],
n – частота вращения кривошипа [об/мин],
![]() - отношения, определяющие положения
центров масс шатунов,
- отношения, определяющие положения
центров масс шатунов,
β – угол развала цилиндров,
p – давление в цилиндре В [H/см2].
ИСХОДНЫЕ ДАННЫЕ
ПАРАМЕТРЫ МЕХАНИЗМА (вариант 8)
|
№ п/п |
Параметр |
Обозна- чения |
Числовое значение |
Размер- ность |
|
1 |
Угол поворота кривошипа, отсчитываемый от линии ОВ0, в сторону вращения кривошипа (рис.1) |
φ1 |
80 |
град. |
|
2 |
Частота вращения коленчатого вала (кривошипа) |
n |
2900 |
|
|
3 |
Угол развала цилиндров (рис.1) |
β |
120 |
град. |
|
4 |
Диаметр поршня |
Dn |
80 |
мм |
|
5 |
Полный ход поршня |
H |
95 |
мм |
|
6 |
Параметр
|
λ |
0,24 |
- |
|
7 |
Отношения, определяющие положения центров масс S2, S4 |
|
0,30 |
- |
|
|
0,30 |
- |
||
|
8 |
Максимальное давление в цилиндре |
Pmax |
|
|
|
9 |
Текущее давление в 1-ом цилиндре |
P1 |
50 |
|
|
10 |
Текущее давление в 2-ом цилиндре |
P2 |
|
|
|
В виду малости можно принять Р5≈0. |
||||
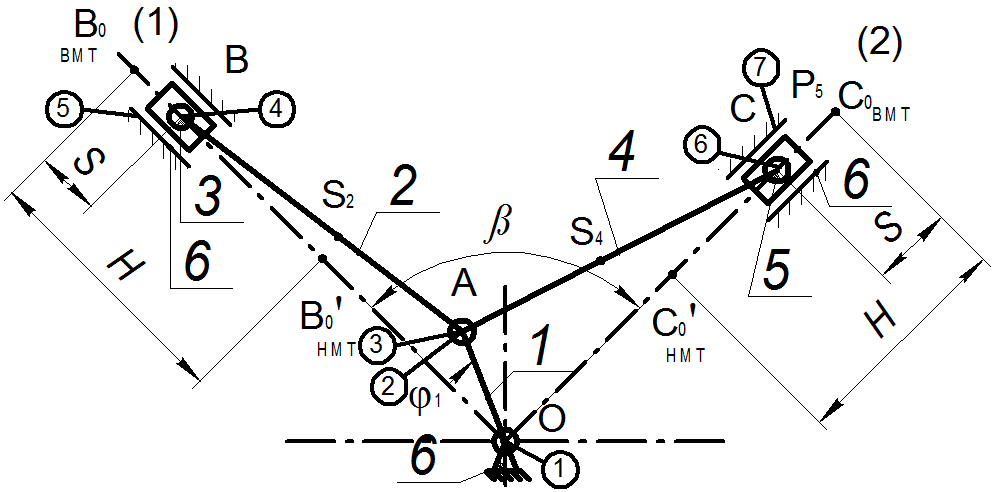
Рис.1 Кинематическая схема кривошипно-ползункового механизма
Содержание.
Содержание……………………………………………………………………………4
1. По структурному анализу
1.1.Описать механизм…………………………………………………………...5
1.2. Определить степень подвижности…………………………………………6
1.3. Выяснить структурные группы механизма………………………………..7
2. По проектированию механизма
2.1. По заданному ходу поршня Н и параметру λ определить размеры кривошипа и шатуна…………………………………………………………………..8
2.2. Вычертить в масштабе кинематическую схему механизма при заданном положении ведущего звена (φ1) и кинематическую схему механизма при двух «мертвых» положениях поршня С……………………………………………………8
3. По кинематическому расчету механизма
3.1. Построить планы скоростей для положений механизма, заданного углом(φ1), а также для одного из «мертвых» положений……………………………9
3.2. Определить скорости центров масс поршней и шатунов………………….12
3.3. Определить величины и направления угловых скоростей шатунов……...13
3.4Построить планы ускорений для положений механизма, заданного угло(φ1), а также для «мертвого» положения , рассмотренного в предыдущем пункте
3.5. Определить ускорения центров масс поршней и шатунов………………..13
3.6. Определить величины и направления угловых ускорений шатунов……..14
4. По силовому расчету
4.1. Определить силы, действующие со стороны газов на поршни…………...16
4.2. Для положения кривошипа, заданного углом (φ1), определить силы инерции и моменты от сил инерции………………………………………………….16
4.3. Определить кинетостатическим способом реакции в кинематических парах…………………………………………………………………………………….16
4.4. Определить уравновешивающую силу для заданного положения механизма при (φ1)……………………………………………………………………..18
4.5. Определить уравновешивающую силу с помощью теоремы Н.Е. Жуковского о «жестком рычаге» для рассмотренного положения механизма……………………………………………………………………………….18
4.6. Сравнить величины уравновешивающей силы, найденные обоими способами выразив разницу в процентах от значения, найденного с помощью теоремы о «жестком рычаге»………………………………………………………….22
Список литературы……………………………………………………………….24