

2.Коэффициенты ошибок следящих систем.
Для оценки точности воспроизведения непрерывных функций часто используются коэффициенты ошибок, которые оказываются наиболее удобными для управляющих сигналов класса полиномов.
Оригиналом
по отношению к изображению
 служит импульсная переходная характеристика
служит импульсная переходная характеристика
 .
Ошибку можно вычислить с помощью
интеграла Дюамеля
.
Ошибку можно вычислить с помощью
интеграла Дюамеля
 .
(10.8)
.
(10.8)
Если
управляющее воздействие представляет
собой непрерывную медленно меняющуюся
функцию, то ее выгодно представить в
виде разложения по степеням

 ,
,
ограничившись
небольшим числом слагаемых. Подставив
это разложение в (10.8), получим выражение
вида
 ,
(10.9) где
,
(10.9) где
 (10.10) называются коэффициентами
ошибки.
(10.10) называются коэффициентами
ошибки.
интегралы
вида (10.10) называются моментами
порядка r
функции
 .
Вычисление коэффициентов ошибки не
обязательно выполняется интегрированием.
Если продифференцировать r
раз
преобразование Лапласа по s
.
Вычисление коэффициентов ошибки не
обязательно выполняется интегрированием.
Если продифференцировать r
раз
преобразование Лапласа по s
 положить затем s
= 0 , то, как
легко видеть, получится выражение вида
(10.10). Вычисления выполняются особенно
просто, если передаточную функцию
положить затем s
= 0 , то, как
легко видеть, получится выражение вида
(10.10). Вычисления выполняются особенно
просто, если передаточную функцию
 представить в виде разложения в
окрестности точки s
= 0
представить в виде разложения в
окрестности точки s
= 0
 (10.11)
(10.11)
причем для этого нет необходимости в многократном дифференцировании, имея в виду, что все передаточные функции принадлежат к классу дробно-рациональных и легко представляются в виде разложения путем деления полиномов, расположенных по возрастающим степеням s.
Коэффициенты ошибок наиболее наглядно показывают, какую роль в точности автоматических систем играет коэффициент усиления в разомкнутом состоянии и так называемый порядок астатизма, с которым необходимо предварительно познакомиться.
БИЛЕТ № 10
1.Преобразование многоконтурных структурных схем.
Автоматические системы, структурная схема которых содержит более одного контура называются многоконтурными. В целом ряде задач необходимо уметь преобразовать многоконтурную структурную схему к одноконтурной и мы рассмотрим здесь несколько типичных случаев. На рис.6.6 показана структурная схема с внутренним стабилизирующим контуром с гибкой обратной связью.
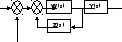
Рис.6.6.Следящая система с внутренним стабилизирующим контуром
Преобразование этой схемы к одноконтурной можно выполнить двумя путями. Первый путь состоит в записи передаточной функции внутреннего контура в виде известного нам выражения (6.3).После такого преобразования система становится одноконтурной с жесткой обратной связью (рис.6.7).Передаточная функция при размыкании этой обратной связи записывается в виде
 .
.
Второй способ состоит в суммировании передаточных функций Y(s) и
Z(s). Система также становится одноконтурной, но передаточная функция ее при размыкании контура выглядит иначе

Таким образом, операция преобразования структурных схем может приводить к различным вариантам передаточных функций разомкнутой системы.
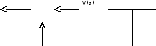
Рис.6.7.Результат преобразования структурной схемы, изображенной на рис.6.6.
Рассмотрим еще пример преобразования схемы с перекрестной обратной связью (рис.6.8).
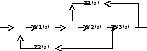 А)
А)
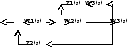 Б)
Б)
Рис.6.8.Преобразование структурной схемы с перекрестной обратной связью.
После получения варианта Б) дальнейшие преобразования сводятся к уже рассмотренным случаям и не требуют комментариев.