

3. Структурный анализ механизма.
Рисунок 3.1.- Кинематическая схема механизма
1.1 Число подвижных звеньев: n=5
1.2 Число кинематических пар 5- го класса: 0-1, 1-2, 2-3, 3-0, 3-4, 4-5, 5-0, P5=7.
1.3 Число кинематических пар 4- го класса: P4=0.
1.4 Степень подвижности механизма: W= 3n- 2P4-P4= 3·5-2·7-0=1;
1.5 Структурная схема механизма.
Разложим механизм на структурные группы, для чего составим структурную схему механизма (рис. 3.2.). Поступательные кинематические пары заменяем вращательными. Нулевое звено (стойку) изображаем неподвижной прямой 0. Ведущее звено 1 изображаем отрезком с двумя шарнирами ( цифра 1 в записи кинематических пар встречается дважды). Аналогично звено 2 изображаем отрезком 2 с двумя шарнирными концами.
Рисунок 3.2.- структурная схема механизма
Третье звено изображаем треугольником (цифра 3 в записи кинематических пар встречается трижды); звенья 4 и 5 изображаем отрезками с двумя кинематическими парами. Звенья 1, 3, 5 замыкаются на нулевое звено.
Отсоединяем сначала двухповодковую группу Ассура, состоящую из звеньев 4, 5. При этом оставшийся механизм продолжает работать, а степень подвижности W не меняется. Затем отсоединяем двухповодковую группу Ассура , состоящую из звеньев 2 и 3. Оставшиеся два звена 0 и 1 образуют ведущий механизм.
Рисунок 3.3.
Таким образом, исследуемый механизм, обладающий одной степенью подвижности, может рассматриваться как образованный путем последовательного присоединения к стойке О и ведущему звену 1 двух групп, состоящих из звеньев 2, 3 и 4, 5.
По классификации И.И. Артобалевского он относится к механизмам 2- го класса, третьего семейства.
Формула строения механизма:
І(0,1) ІІ (2,3) ІІІ
(4,5).

4. Кинематическое исследование механизма
4.1.Исходные данные:
ОА= мм; АВ= мм; ВС= мм; ВD= мм;
AS2=0,5AB= мм; BS3=0,5BC= мм; BS4= 0,5BD= мм;
x= мм; у = мм; n1= об./мин.;
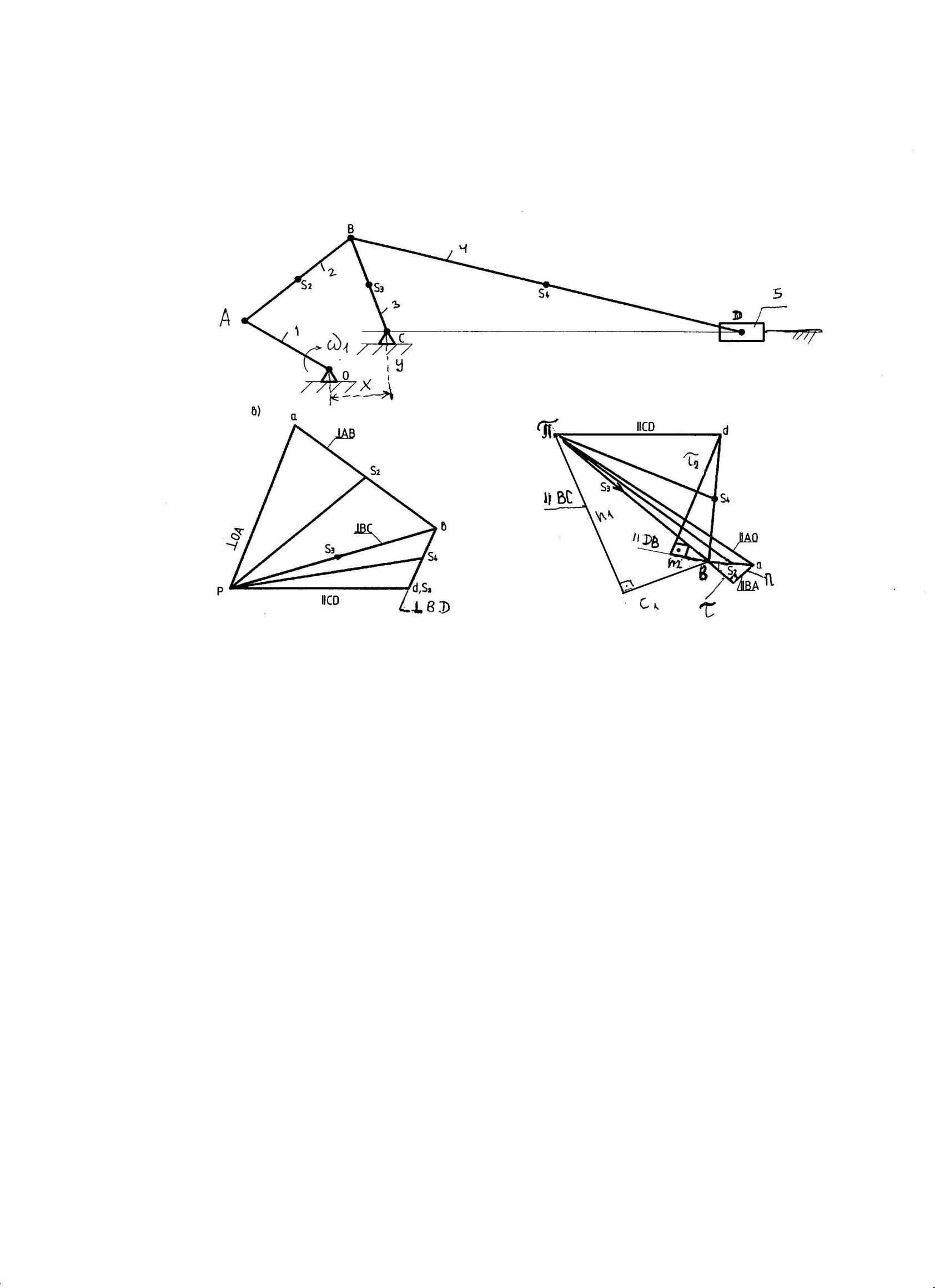
Рисунок 4.1.– План положения, планы скоростей и ускорений
4.2 Планы положений механизма
В масштабе µе = … м/мм строим планы механизма, начиная с построения положений ведущего звена- кривошипа ОА. Кривошип изображаем в восьми положениях через каждые 45°, начиная с положения, соответствующего левому крайнему положению механизма. Крайнее положение механизма получим делая засечки на траектории движения точки В из центра О радиусами (ОА+АВ) и (АВ-ОА). Положение остальных звеньев определяем методом засечек.
Величины и направления скоростей точек и угловых скоростей звеньев механизма определяем графически построением планов скоростей.
4.3 План скоростей (рис.4.1. )
1. Скорость точки
A-VA:
VA= OA· ω1
Где ω1
= =
=
 = рад/с
- угловая
скорость кривошипа ОА.
= рад/с
- угловая
скорость кривошипа ОА.
VA= 0,11·7,64= 0,84 м/с
VA OA и направлен в сторону вращения кривошипа.
2. Масштаб плана скоростей- µV:
µv=
 =
=
 =
м/с·мм,
=
м/с·мм,
где PA- длина отрезка, представляющего вектор скорости точки А на плане скоростей.
3.Скорость точки
В- VB
:
VB
= VA+
VBA
VB O1B VBA BA (1)
Строим треугольник скоростей точки В на основании (1) .Вектор Pb является вектором VB скорости точки В.
4. Скорость точки D:
VD=
VB+
VDB
VD x-x VDB B1D1 (2)
Строим треугольник скоростей точки D на основании уравнения (2). Вектор Pd является вектором скорости VD точки D.
5. Скорость центров тяжести звеньев.
Положение точек S2, S3, S4 на плане скоростей определяется делением отрезков ab, bc и cd пополам.
Соединив полученные точки с полюсом плана скоростей, получим векторы ps2, ps3, ps4.
6. Значение скоростей точек получим произведением длин отрезков, взятых из плана скоростей , на масштаб плана скоростей:
VBA= ab·µν, VB= pb·µν, VDB= db·µν, VD= pd·µν,
VS2= ps2·µν, VS3= ps3·µν, VS4=ps4·µν, VS5=VD.
Направления скоростей точек определяется направлением на плане скоростей векторов pa, pb, pd, ba и т.д.
7. Угловые скорости звеньев по величине равны:
ω2= VBA / BA; ω3= VB/ BC; ω4= VDC/ DC
Направление угловых скоростей определяется направлением вращения звеньев под действием перенесенных на кинематическую схему векторов скоростей VBA, VB, VDC в соответствующие точки.
8. Полученные результаты сведем в таблицу.
Таблица 4.1.