

Лабораторные работы / ПР2 Синтез последовательных и параллельных КУ
.docxСАРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ВЕЧЕРНЕ-ЗАОЧНЫЙ
КАФЕДРА «УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ»
ПРАКТИЧЕСКАЯ РАБОТА № 2
по дисциплине
Локальные системы управления
СИНТЕЗ ПОСЛЕДОВАТЕЛЬНЫХ И ПАРАЛЛЕЛЬНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ АВТОМАТИЧЕСКИХ СИСТЕМ
Вариант № 10
Выполнил: ст. гр. УИТ - 52в
Макаров Ю.А.
Проверил:
Скоробогатова Т.Н.
2009
Цель работы: изучить порядок синтеза последовательных и параллельных корректирующих устройств систем автоматического регулирования (САР), ознакомиться с порядком определения их параметров.
Задание: по выданному варианту схемы системы автоматического регулирования и передаточным функциям звеньев оценить показатели качества переходного процесса системы и провести подбор корректирующего устройства.
Исходные данные:
Рисунок 1 – Структурная схема САР
Передаточные функции звеньев:



Найдем общую передаточную функцию замкнутой САР:
 ,
,
 .
.
Построим график
переходной функции замкнутой системы
в MATLAB.
По графику видно, что переходный процесс
является сходящимся, то есть исследуемая
САР устойчива. Несмотря на устойчивость
системы, она имеет очень низкое
быстродействие, большое перерегулирование
 и колебательность
и колебательность
 ,
что не удовлетворяет предъявляемым
требованиям (
,
что не удовлетворяет предъявляемым
требованиям ( ,
,
 ).
).

Рисунок 2 – Переходная функция данной САР
Для того чтобы
улучшить показатели качества системы,
включим в ее структурную схему параллельное
корректирующее устройство (рисунок 3).
Рисунок 3 – Структурная схема скорректированной САР
Проведем синтез корректирующего устройства построением реальной и желаемой ЛАЧХ системы. Для этого сначала найдем передаточную функцию разомкнутой реальной САР:
 ,
,
 .
.
Построим график реальной ЛАЧХ в MatLab.
>> Wr=tf([1.111],[1.214 121.4 1 0])
Transfer function:
1.111
-------------------------
1.214 s^3 + 121.4 s^2 + s
>> sigma(Wp)

Рисунок 3 – График располагаемой ЛАЧХ САР
Аппроксимируем
полученную ЛАЧХ стандартными типовыми
наклонами и определим сопрягающие
частоты:
 c-1,
c-1,
 c-1.
c-1.
Построим график желаемой ЛАЧХ.
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. Желаемая ЛАЧХ (ЖЛАЧХ) состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Низкочастотная часть формируется в соответствии с требованиями к точности, которую можно оценить по воспроизведению системой гармонического входного сигнала.
Пусть
на вход подан сигнал
 ,
,
где
 - амплитуда гармонического сигнала.
- амплитуда гармонического сигнала.
Известно, что ЛАЧХ системы в области низких частот должна быть
расположена
не ниже контрольной точки
 с координатами
с координатами
 ;
;
 ,
,
где
 -
допустимая ошибка (
-
допустимая ошибка ( ).
).
Пусть требуемые значения максимальной скорости и ускорения системы:
 (c-1)
- скорость изменения входной величины,
(c-1)
- скорость изменения входной величины,
 (с-2)
- ускорение изменения входной величины.
(с-2)
- ускорение изменения входной величины.
Найдем значение
частоты рабочей точки:
 с-1.
с-1.
Найдем значение амплитуды рабочей точки:
 дБ/дек.
дБ/дек.
Среднечастотная часть ЛАЧХ должна пересекать ось частот с наклоном –20 дБ/дек, причем этот отрезок ЛАЧХ обычно ограничивается с левой стороны отрезком с наклоном –40 дБ/дек, а с правой –40 или –60 дБ/дек, в зависимости от наклона ЛАЧХ нескорректированной системы.
Для определения границ среднечастотного участка вводится понятие базовой частоты
 с-1.
с-1.
По базовой частоте вычисляется частота среза
 ,
,
где
 - колебательность (
- колебательность ( )
)
 с-1.
с-1.
По
частоте среза определяются частоты
 и
и
 ,
соответствующие
началу и концу среднечастотного участка:
,
соответствующие
началу и концу среднечастотного участка:
 ,
,
 ,
,
 с-1;
с-1;
 ,
,
 ,
,
 с-1.
с-1.
Высокочастотная часть ЛАЧХ не оказывает влияние на точность системы и ее динамические характеристики, поэтому наклоны высокочастотной части ЛАЧХ можно сделать такие же, как и у исходной системы.
Дополним рисунок 3 построением ЖЛАЧХ САР (рисунок 4).
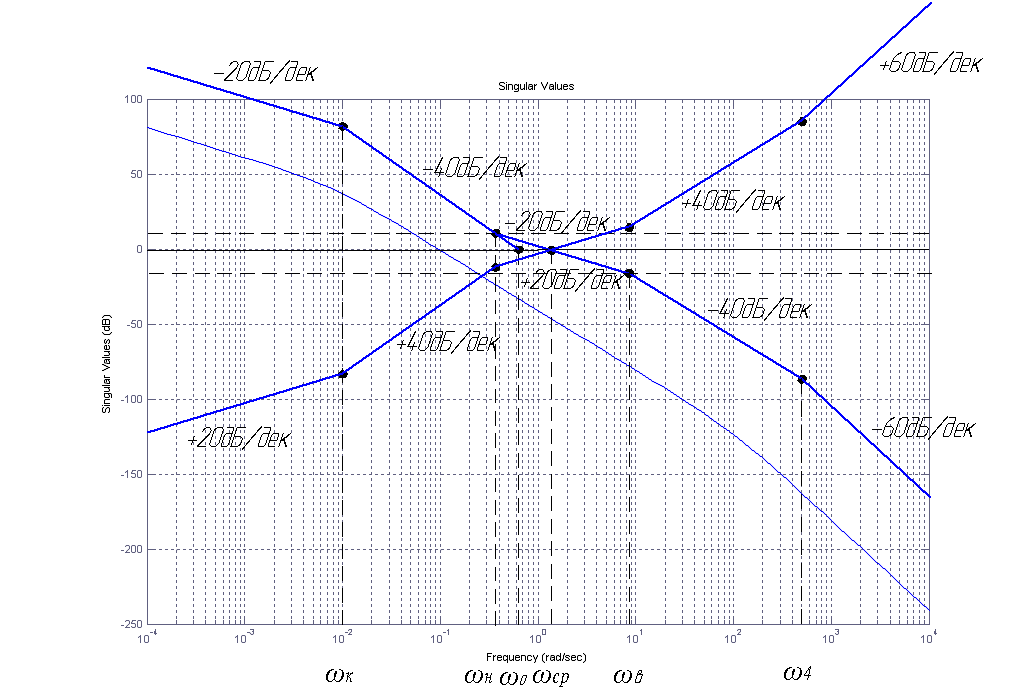
Рисунок 4 – График желаемой ЛАЧХ САР и корректирующего устройства
Построим график
параллельного корректирующего устройства
зеркальным отображением графика ЖЛАЧХ:
 .
.
Определим
передаточную функцию параллельного
корректирующего устройства: наклон
 - дифференцирующее звено с передаточной
функцией
- дифференцирующее звено с передаточной
функцией
 ,
наклон
,
наклон
 после частоты
после частоты
 соответствует включению форсирующего
звена первого порядка с передаточной
функцией
соответствует включению форсирующего
звена первого порядка с передаточной
функцией
 ,
наклон
,
наклон
 после частоты
после частоты
 соответствует апериодическому звену
первого порядка
соответствует апериодическому звену
первого порядка
 ,
наклон
,
наклон
 после частоты
после частоты
 - форсирующему звену первого порядка
- форсирующему звену первого порядка
 и наклон
и наклон
 соответствует включению форсирующего
звена первого порядка с передаточной
функцией
соответствует включению форсирующего
звена первого порядка с передаточной
функцией

Таким образом, передаточная функция параллельного корректирующего устройства
 ,
,
где
 ,
,
 ,
,
 ,
,
 с,
с,
 с,
с,
 с,
с,
 .
.
То есть,
 .
.
Включение в систему параллельного корректирующего устройства должно уменьшить время регулирования, перерегулирование системы и ее колебательность.
С помощью MatLab найдем передаточную функцию скорректированной замкнутой системы.
3.749 s^4 + 376.2 s^3 + 137.9 s^2 + 1.111 s
-----------------------------------------------------------------------
4.096 s^7 + 820.7 s^6 + 4.127e004 s^5 + 1.541e004 s^4 + 245.6 s^3 + s^2

Построим график переходной функции в МАTLAB (рисунок 5):
>> wzg=w1*w2*w3/(1+wk*w2*w3)
Transfer function:
3.749 s^4 + 376.2 s^3 + 137.9 s^2 + 1.111 s
-----------------------------------------------------------------------
4.096 s^7 + 820.7 s^6 + 4.127e004 s^5 + 1.541e004 s^4 + 245.6 s^3 + s^2
>> step(Wzskor)

Рисунок 5 - График переходной функции скорректированной САР
По графику видно, что после введения в систему параллельного корректирующего устройства перерегулирование и колебательность системы уменьшились (равны 0), а точность увеличилась.
В атласе Топчеева построенному графику ЛАЧХ параллельного корректирующего устройства соответствует RC-цепь, являющуюся фильтром, который будет «гасить» колебания в системе.
Схематическое изображение ЛАЧХ корректирующего устройства имеет вид:
По таблице 9.1 атласа Топчеева найдём схему для второго и третьего корректирующих устройств (КУ2 и КУ3) – рисунок 7 и для первого корректирующего устройства (КУ1) – рисунок 8. При этом КУ2 и КУ3 должны быть соединены между параллельно, а КУ1 с КУ2 и КУ3 – последовательно.

Рисунок 6 – ЛАЧХ корректирующего устройства и её эквивалентное
представление

Рисунок 7 – Схема второго, третьего и четвертого корректирующих устройств

Рисунок 8 – Схема первого корректирующего устройства
Вывод: ввод в систему параллельного корректирующего устройства позволил уменьшить колебательность и перерегулирование системы и увеличить ее быстродействие.