

Двузначная нелинейность

Рисунок 24

Рисунок 25

Рисунок 26
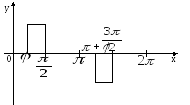
Рисунок 27
![]() ,
(89)
,
(89)
![]() ,
(90)
,
(90)
![]() ,
,
![]() ,
(91)
,
(91)
 ,
(92)
,
(92)
![]() ,
(93)
,
(93)
 ,
(94)
,
(94)
при
![]() ,
,
![]() ,
(95)
,
(95)
![]() ,
(96)
,
(96)
![]() .
.
С помощью шаблонов находят амплитуды и частоты автоколебаний в нелинейных системах и строят области устойчивых и неустойчивых состояний по параметрам линейной и нелинейной части.
Существует два типа двухзначных нелинейностей: пассивные и активные.
Под пассивными – понимаются такие двузначные нелинейности, которые за один период входного сигнала нелинейной характеристики обходится против часовой стрелки. В этом случае в выходном сигнале наблюдается фазовое запаздывание. Если обход нелинейной характеристики проходит по часовой стрелке, то двузначная нелинейность является активной и в выходном сигнале имеет место фазовое опережение. Активные нелинейности применяют в устройствах коррекции СА для обеспечения устойчивости. Реализация таких устройств может быть выполнена на электронных элементах или в виде рабочей программы.
Рассмотрим гармоническую линеаризацию нелинейности, когда на их вход поступает сигнал вида:
![]() ,
(97)
,
(97)
где
![]() - постоянная составляющая основного
сигнала.
- постоянная составляющая основного
сигнала.
![]() ,
(98)
,
(98)
![]() - функция смещения
входного сигнала;
- функция смещения
входного сигнала;
![]() - коэффициент
гармонической линеаризации.
- коэффициент
гармонической линеаризации.
![]() .
(99)
.
(99)
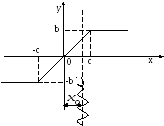
Рисунок 28
 ,
,
 ,
(101)
,
(101)
при
![]() - для однозначной нелинейности со
смещением.
- для однозначной нелинейности со
смещением.
Для двухзначной нелинейности

Рисунок 29
 ,
(102)
,
(102)
 ,
(103)
,
(103)
![]() .
(104)
.
(104)
В нелинейных системах при недостаточном уровне подавления линейной части высших гармоник, необходимо учитывать дополнительные гармонические составляющие – автоколебания. При этом эквивалентная передаточная функция зависит от двух сигналов: частотного или многочастотного сигналов. Использование таких передаточных функций в нелинейных системах целесообразно, если требуется оценить влияние высших гармоник на появление автоколебаний.
Например: если в системе на первой гармонике открывают автоколебания, а действие третей появится.
Пусть на вход двузначной нечетной нелинейности поступает сигнал:
![]() ,
(106)
,
(106)
где
![]() - сдвиг фазы третьей гармоник.
- сдвиг фазы третьей гармоник.
Тогда на выходе
![]() .
(107)
.
(107)
Пусть
![]() ,
,
![]() ,
(108)
,
(108)
где
![]() и
и![]() - коэффициенты линеаризации по первой
и третьей гармонике.
- коэффициенты линеаризации по первой
и третьей гармонике.
![]() .
(109)
.
(109)