

Методы линеаризации уравнений
Дифференциальные уравнения можно линеаризовать следующими методами:
1. нелинейная функция рабочей области раскладывается в ряд Тейлора.
2. Заданные в виде графов нелинейные функции линеаризуются в рабочей плоскости прямыми.
3. Вместо непосредственного определения частных производных, вводятся переменные в исходные нелинейные уравнения.
![]() ,
(31)
,
(31)
![]() ,
(32)
,
(32)
![]() .
(33)
.
(33)
4. Данный метод основан на определении коэффициентов по методу наименьших квадратов.
Пример: Пневмопривод со встроенной трубкой.

Рисунок 6
![]() ,
(34)
,
(34)
где
![]() - постоянное времени пневмопривода;
- постоянное времени пневмопривода;
![]() - передаточный
коэффициент пневмопривода;
- передаточный
коэффициент пневмопривода;
![]() - коэффициент
демпфирования пневмопривода.
- коэффициент
демпфирования пневмопривода.
Внутреннее строение элементов САР наиболее просто определяется с помощью структурных схем графов. В отличие от известных структурных схем в графах, переменные указываются в виде времени, а дуги обозначают или параметры, или передаточные функции типовых звеньев. Между ними существует четкое соотношение.


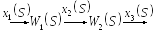




Рисунок 7
Существует 49 звеньев в таблице с амплитудными, фазовыми и амплитудно-фазовыми характеристиками, типовых звеньев и 49 типовых звеньев с ЛАЧХ и ЛФЧХ.
Пример № 1.
![]() .
(35)
.
(35)

Рисунок 8 – Амплитудная характеристика

Рисунок 9 – Фазовая характеристика
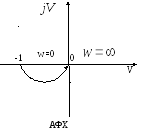
Рисунок 10 – Амплитудно-фазовая характеристика
Пример № 2.
![]() .
(36)
.
(36)
ФХ
Рисунок 11 – Амплитудная характеристика
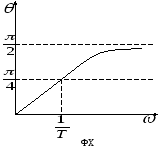
Рисунок 12 – Фазовая характеристика

Рисунок 13 – Амплитудно-фазовая характеристика
Существует таблица
поправок логарифмическим характеристикам,
монограмма замыкания, используется
регрессивный анализ для получения
математической модели ОУ. Дается
монограмма № 1
![]() ,
предназначенная для вычисления
коэффициентов регрессивной модели. При
проектировании непрерывных,
дискретно-непрерывных и дискретных
САР, надо знать статическое моделирование
ОУ.
,
предназначенная для вычисления
коэффициентов регрессивной модели. При
проектировании непрерывных,
дискретно-непрерывных и дискретных
САР, надо знать статическое моделирование
ОУ.
Дискретная система, передаточная функция, частотные характеристики, импульсные переходные функции, удобны лишь при моделировании. При высоких порядках модели, такие процедуры требуют использования значительных временных затрат. Именно поэтому стали пользоваться векторно-матричными формами записи данных уравнениями. При этом один линейный объект входит две матрицы А и В.
Стационарный объект можно записать в виде векторно-матричного уравнения:
![]() ,
(37)
,
(37)
![]() ,
(38)
,
(38)
![]() - нормальная форма
записи. (39)
- нормальная форма
записи. (39)
где
![]() и
и![]() - векторы размерности
- векторы размерности![]() и
и![]() .
.
В соответствии с векторно-матричным уравнением построим структурную схему многомерного объекта, который в дальнейшем будем называть типовым.

Рисунок 14
Для нестационарного объекта:
![]() .
(40)
.
(40)
Вектор
![]() и матрицы
и матрицы![]() и
и![]() имеют те же размерности, отличие
заключается в том, что матрицы
имеют те же размерности, отличие
заключается в том, что матрицы![]() и
и![]() зависят от времени. Структурная схема
остается той же. Существуют и другие
формы построения структурных схем,
отличающиеся способом введения
дополнительных отрицательных и
положительных ОС.
зависят от времени. Структурная схема
остается той же. Существуют и другие
формы построения структурных схем,
отличающиеся способом введения
дополнительных отрицательных и
положительных ОС.
Большинство из них может быть приведено к типовым схемам.