

6 Построение жлачх и жфчх
Для построения ЖЛАЧХ находится запретная зона, ниже которой ЖЛАЧХ опускаться не может.
Переходный процесс системы имеет малое время регулирования и перерегулирования. Эти показатели качества вполне удовлетворяют своим значениями, но на практике такие значения для электрогидравлической системы практически невозможны.
Допустим, что перерегулирование системы составляет 30%. По номограмме Солодовникова, изображенной на рисунке 11.
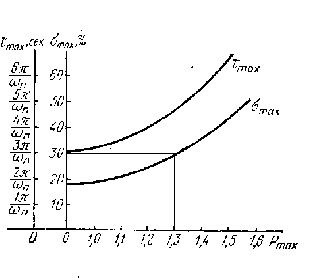
Рисунок 11 - Номограмма Солодовникова
Взяв выбранное значение перерегулирования, определим требуемое значение Рmах, а по этому значению и кривой τmах найдем время регулирования:
![]() (93)
(93)
Так как в нашем случае перерегулирование равно 30%, а время регулирования 0,96 секунды, то согласно кривым Солодовникова:
Pmax(λ) =1,3 (94)
m = 5 (95)
З ная
время регулирования, получим:
ная
время регулирования, получим:
![]() (96)
(96)
Частота среза:
![]() (97)
(97)
где ψ1 - основной коэффициент наклона ВЧХ.
![]() (98)
(98)
![]() (99)
(99)
Необходимо, чтобы желаемая ЛАЧХ проходила через точку частоты среза под наклоном -20 дБ/дек. Зададим зону среднечастотной части ЛАЧХ, которая ограничивает участок ЛАЧХ с наклоном -20 дБ/дек, проходящую через точку частоты среза. Система будет работать вполне надежно, если амплитуда этой части будет составлять 5-20 дБ. В положительной части системы координат зона имеет превышение над осью λ 6 дБ, а в отрицательной части системы координат эта зона лежит ниже оси λ на 17 дБ.
Низкочастотную часть желаемой ЛАЧХ оставляем без изменения, так как при её изменении коэффициент усиления системы также изменится, что приведет к нарушению нормального функционирования системы.
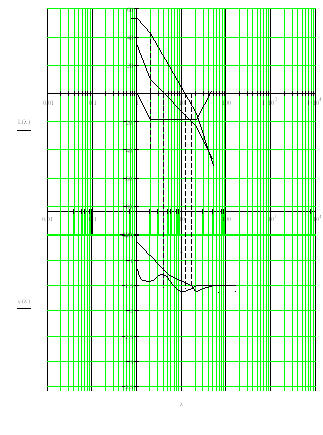
Высокочастотную часть желаемой ЛАЧХ проводим произвольно, так как её расположение не оказывает существенного влияния на работоспособность и устойчивость системы. График желаемой ЛАЧХ изображен на рисунке 12.
По виду ЖЛАЧХ определяется передаточная функция:
 (100)
(100)
Производим замену p на jω:
![]()
 (101)
(101)
Вещественная и мнимая частотные характеристики:
![]()
![]()
Фазо-частотная характеристика определяется следующим выражением:
![]() (102)
(102)
Задаваясь численными значениями псевдочастоты λ, находим значения фазо-частотной характеристики и заносим их в таблицу 2, по которой строим график ЖЛФЧХ, изображенный на рисунке 12.
Таблица 2 - Значения желаемой фазо-частотной характеристики
-
ω
1
5
10
1000
φ(ω)
-157,40
-172,60
-159,020
-181,460
Таким образом, исходя из графика ФЧХ, определим запасы устойчивости по фазе и по амплитуде. Запас устойчивости по фазе составляет 22,7°. Запас устойчивости по амплитуде составляет -12 дБ.
Р
 исунок
12 – Графики ЖЛАЧХ и ЖЛФЧХ
исунок
12 – Графики ЖЛАЧХ и ЖЛФЧХ
7 ПОСТРОЕНИЕ ЛАЧХ КОРРЕКТИРУЮЩЕГО
УСТРОЙСТВА И РАСЧЕТ ЕГО ПАРАМЕТРОВ
ПОСТРОЕНИЕ ЛАЧХ КОРРЕКТИРУЮЩЕГО
УСТРОЙСТВА И РАСЧЕТ ЕГО ПАРАМЕТРОВ
Выбираем последовательное корректирующее устройство, так как необходимо улучшить динамические характеристики системы, косвенно влияя на величину их ошибки, также необходимо понизить частоту среза.
Таким образом, передаточная функция желаемой ЛАЧХ будет определяться как произведение передаточных функций фактической ЛАЧХ и корректирующего устройства:
![]() (103)
(103)
Переходя к логарифмическим характеристикам:
![]() (104)
(104)
![]() (105)
(105)
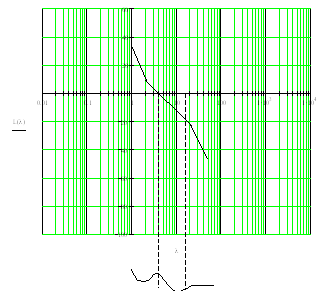
По выражению (105) строим ЛАЧХ корректирующего устройства, которая изображена на рисунке 13.
Р
 исунок
13 – ЛАЧХ корректирующего устройства
исунок
13 – ЛАЧХ корректирующего устройства