

Необходимо также считаться с недостатками гидропривода, а именно:
КПД объемного гидропривода несколько ниже, чем КПД механических и электрических передач, и, кроме того, он снижается в процессе регулирования;
условия эксплуатации гидропривода (температуры) влияют на его характеристики;
КПД гидропривода несколько снижается по мере выработки его ресурса из-за увеличения зазоров и возрастания утечек жидкости (падение объемного КПД);
ч
 увствительность
к загрязнению рабочей жидкости и
необходимость достаточно высокой
культуры обслуживания.
увствительность
к загрязнению рабочей жидкости и
необходимость достаточно высокой
культуры обслуживания.
1Техническое задание
Цель курсовой работы
Целью курсового проекта является автоматическое регулирование объемным гидроприводом. Необходимо обеспечить нормальные запасы устойчивости по амплитуде и по фазе. Также система должна иметь хорошие показатели качества. При необходимости систему следует скорректировать и вычислить параметры корректирующего устройства.
1.2 Описание функциональной схемы
С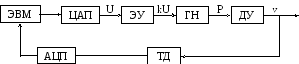 истема
автоматического регулирования объемным
гидроприводом состоит из микропроцессора
(МП), электронного усилителя (ЭУ),
гидронасоса (ГН), дроссельного устройства
(ДУ), тахометрического датчика (ТД).
Функциональная схема системы изображена
на рисунке 2.
истема
автоматического регулирования объемным
гидроприводом состоит из микропроцессора
(МП), электронного усилителя (ЭУ),
гидронасоса (ГН), дроссельного устройства
(ДУ), тахометрического датчика (ТД).
Функциональная схема системы изображена
на рисунке 2.
Рисунок 2 - Функциональная схема системы
Управление в системе происходит следующим образом.
Сигнал с микропроцессора (управляющее напряжение Uмп) поступает на гидронасос через электронный усилитель. Гидронасос подает жидкость в дроссельное устройство под некоторым давлением (Р). Дроссельное устройство в свою очередь, в зависимости от давления на входе, регулирует скорость потока жидкости в гидроприводе.
С корость
этого потока фиксируется с помощью
тахометрического датчика, который
вырабатывает соответствующий электрический
сигнал (Uтд)
зависимости от изменения скорости
потока жидкости в гидроприводе.
Микропроцессор анализирует сигнал
с тахометрического датчика и по заданному
алгоритму управления вырабатывает
сигнал управления (Uмп).
корость
этого потока фиксируется с помощью
тахометрического датчика, который
вырабатывает соответствующий электрический
сигнал (Uтд)
зависимости от изменения скорости
потока жидкости в гидроприводе.
Микропроцессор анализирует сигнал
с тахометрического датчика и по заданному
алгоритму управления вырабатывает
сигнал управления (Uмп).
Технические данные системы:
Давление изменяется в пределах 15 -20 МПа
Скорость жидкости 7-10 м/с
Расход на выходе системы 60 - 90 дм3/мин
Перерегулирование системы 10 -30%
Время регулирования до 3 с
2Выбор элементной базы, проведение линеаризации, расчет передаточных функций элементов системы
2.1 Выбор микропроцессора
Выбран однокристальный микропроцессор серии КР180ВМ1А.. Это шестнадцатиразрядный, имеющий фиксированный набор (систему) команд, совместимую с системой команд ЭВМ. Микропроцессор осуществляет обработку как внешних, так и внутренних прерываний и организует обмен информацией между микропроцессором и внешними устройствами. В микропроцессоре используются регистровая, косвенно-регистровая, автоинкрементная, косвенно-автоинкрементная индексная, косвенно-индексная виды адресаций.
Технические данные микропроцессора КР180ВМ1А:
Напряжение питания 5В±5%
Разрядность обрабатываемых команд 16
Число выполняемых команд 68
Максимальный объем памяти 64 Кбайт
Число уровней прерывания 4
Быстродействие 500 тыс. оп./с
Максимальная тактовая частота 4,7 МГц
Максимальный потребляемый ток 0,24 А
Максимальная потребляемая мощность 1,2 Вт
Передаточная функция микропроцессора:
Wмп (р) = 1 (1)
2.2 Выбор усилителя
В качестве электронного усилителя принимаем многокаскадный усилитель напряжения, обеспечивающий необходимую мощность двигателя и насоса.
И спользуется
микросхема операционного усилителя
типа КР140УД1 с коэффициентом усиления
по напряжениюkу =
55 и шесть тиристоров типа КУ205Н вместе
дающих выходную мощность 6 КВт.
спользуется
микросхема операционного усилителя
типа КР140УД1 с коэффициентом усиления
по напряжениюkу =
55 и шесть тиристоров типа КУ205Н вместе
дающих выходную мощность 6 КВт.
Технические характеристики усилителя:
Выходное напряжение 220 В
Выходная мощность 6 КВт
Минимальное входное напряжение 10 мВ
Время управления тиристорного привода 2 - 10-6 с
Так как время управления тиристорного привода слишком мало и в дальнейшем существенно не повлияет на точность расчета, характеристики и показатели качества рассчитываемой системы, то пренебрегаем её значением и, следовательно, передаточная функция усилителя:
Wу(р) = kу = 55 (2)
2.3 Выбор двигателя с гидронасосом и расчет их передаточных функций
В гидроприводе с дроссельным регулированием скорости потока жидкости применяется так называемая схема с постоянным давлением. Исходя из этого, необходимо обеспечить постоянство величины подаваемого давления в гидросистеме. Наилучшие характеристики при этом имеют центробежные насосы.
Введем в нашу систему центробежный лопастной насос типа «Гидроматик», лопасти которого расположены на валу электродвигателя постоянного тока типа П-51.
Технические данные насоса «Гидроматик»:
Частота вращения лопастей насоса
(с учетом скольжения электродвигателя) 1450 об/мин
Номинальная мощность насоса 5,7 КВт
Рабочий объем 80 см3
Д авление
на выходе насоса
20 МПа
авление
на выходе насоса
20 МПа
Момент инерции вращающихся частей насоса 4,25-10 – 4 кг · м2
Подача (расход) 77,3 дм3/мин
К.П.Д 70%
Масса гидромашины 44 кг
Технические данные электродвигателя постоянного тока П-51:
Номинальная мощность электродвигателя 6 КВт
Номинальное входное напряжение 220 В
Номинальная частота вращения 1500 об/мин
Номинальный ток якоря 33 А
К.П.Д 82,5%
Сопротивление обмотки якоря 0,565 Ом
Число витков обмотки якоря 372
Сопротивление обмотки возбуждения 262 Ом
Момент инерции вращающихся частей электродвигателя 8,75-10 -2 кг · м2
Двигатель проходит по мощности, так как номинальная его мощность больше требуемой номинальной мощности для насоса. Двигатель совместно с насосом составляют единый функциональный элемент, поэтому проверке по скорости и по моменту не подвергается.
Расчет передаточной функции двигателя с насосом:
Номинальный момент двигателя с насосом:
![]() (3)
(3)
Приведенный момент инерции:
![]() (4)
(4)
Угловая частота вращения вала электродвигателя:
![]() (5)
(5)
З начение
электрической конструктивной постоянной:
начение
электрической конструктивной постоянной:
![]() (6)
(6)
Найдем значение механической конструктивной постоянной:
![]() (7)
(7)
Коэффициент передачи двигателя по управляющему воздействию:
![]() (8)
(8)
Значения электрической и механической постоянных времени электродвигателя с насосом:
![]() (9)
(9)
![]() (10)
(10)
Коэффициент передачи по давлению нагнетающей части, то есть насоса:
![]() (11)
(11)
Так как ТЭ>>Тм, то передаточная функция электродвигателя с насосом примет вид:
![]() (12)
(12)
2.4 Выбор и расчет передаточной функции дроссельного устройства
Когда требуется обеспечить постоянство скорости исполнительного механизма независимо от нагрузки, действующей на него, чаще всего устанавливают в гидросистему дроссельные регуляторы скорости.
В большинстве конструкций таких регуляторов
постоянство расхода жидкости в системе
(а, следовательно, и постоянство скорости
исполнительного механизма)
обеспечивается за счет поддержания
постоянства перепада давлений на
чувствительном элементе регулятора -
дроссельной шайбе независимо от
колебания давлений на входе и выходе
из него.
большинстве конструкций таких регуляторов
постоянство расхода жидкости в системе
(а, следовательно, и постоянство скорости
исполнительного механизма)
обеспечивается за счет поддержания
постоянства перепада давлений на
чувствительном элементе регулятора -
дроссельной шайбе независимо от
колебания давлений на входе и выходе
из него.
Регулятор состоит из дросселя с постоянным или регулируемым открытием, регулирующий подачу рабочей жидкости в левый и правый каналы дроссельного устройства, а также золотникового дроссельного устройства.