

6.1 Характеристики скорректированной системы.
Построение ЖФЧХ и ЖЛАЧХ показали, что запасы устойчивости по амплитуде и по фазе улучшились. Запас устойчивости по фазе: Δφж = 750. Запас устойчивости по амплитуде определяется превышением Lж над 20lg 0 на частоте пересечения ж с осью 180. Так как ж не достигает 180, находясь выше этого значения, то запас устойчивости по амплитуде: ΔА = .
Таким образом, получена система с характеристиками лучшими, чем у реальной с большим запасом устойчивости по фазе и бесконечным по амплитуде.
Желаемая система получается из реальной путем введения корректирующего устройства.

Рисунок 6 - Построение ЖЛАЧХ, ЖФЧХ, ЛАЧХ КУ
7 Подбор корректирующего устройства
Для коррекции в системе применяется корректирующее устройство последовательного типа, поскольку оно обеспечивает наиболее простую схему включения, не требует сложных элементов для согласования, передает значения величин управляющих сигналов (тока, напряжения), кроме того, расширяет полосу пропускания частот при наличии дифференцирующих звеньев в цепи регулирования, что позволяет передавать большую мощность сигнала.
КУ можно включать между различными элементами исходной системы. При выборе места включения руководствуются минимумом вносимой устройством погрешности.
Передаточная функция корректирующего устройства:
![]() (53)
(53)
1-й участок: - 20 - 0 = -20
2-й участок: - 20 - (-20) = 0
3-й участок: - 20 - (-40)= +20
4-й участок: - 40 - (-40) = 0
 (54)
(54)
Коэффициент усиления k равен 20.
Из графика корректирующего устройства частоты сопряжения Lку определяются: λ1 = 10 (с-1); λ2= 50 (с-1); λ3 = 100 (с-1).
Тогда постоянные времени Lку:
Расчеты дают:
![]() (55)
(55)
Звено
![]() представляет собой интегрирующее звено.
Для данного звена характерна простейшая
корректирующая цепь – RC – четырехполюсник.
Схема данной RC – цепочки приведена
ниже:
представляет собой интегрирующее звено.
Для данного звена характерна простейшая
корректирующая цепь – RC – четырехполюсник.
Схема данной RC – цепочки приведена
ниже:

Рисунок 7 – RC - четырехполюсник
Параметры RC – цепочки:
![]() ;
Т1
=
0,1 с; примем R1
=
2·104
Ом,
тогда С1
=
2105
Ф.
;
Т1
=
0,1 с; примем R1
=
2·104
Ом,
тогда С1
=
2105
Ф.
Множитель
![]() представляет собой корректирующую
RC-цепочку, схема которой приведена ниже.
представляет собой корректирующую
RC-цепочку, схема которой приведена ниже.
Параметры RC – цепочки:

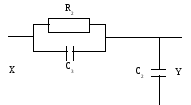
Рисунок 8 – Корректирующая RC – цепочка
К орректирующее
устройство системы примет следующий
вид:
орректирующее
устройство системы примет следующий
вид:
Рисунок 9 – Корректирующее устройство системы
Структурная схема скорректированной САУ изображена на рисунке 10.
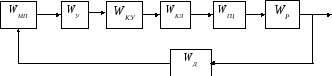
Рисунок 10 – Структурная схема скорректированной САК
Для составления разностного уравнения необходимо перейти к переменной z.
Период дискретизации системы Т0 = 0,5 с.
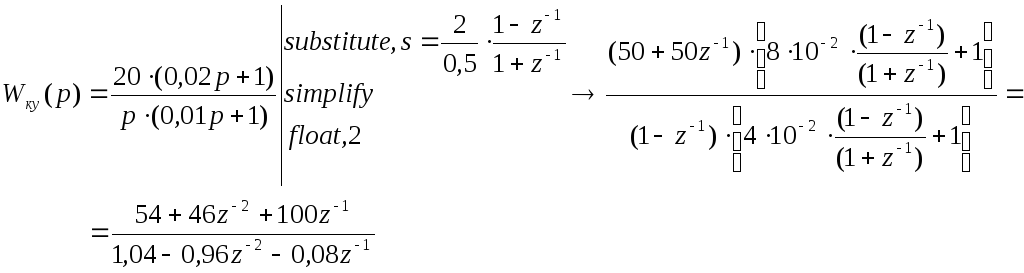 (56)
(56)
Разностное уравнение в реальном масштабе времени, то есть с дополнительным сдвигом z-1:
![]() (57)
(57)
Характеристическое уравнение:
![]() (58)
(58)
Для составления программы, выражение (57) представлено в виде:
Yk(t) = 1,04Yk – 0,96Yk-1 - 0,08Yk-2 – 54Xk – 46Xk-1 – 100Xk-2 (59)
Микропроцессор выявляет отклонение полученного сигнала от желаемого, то есть необходимого в данный момент, и выдает команду на устранение этого отклонения.
Значения желаемого сигнала задаются в микропроцессоре в цифровом виде. Вычисления производятся в машинном коде.
Реализация разностного уравнения на языке Assembler приведена ниже:
;РАСЧЕТ РАЗНОСТНОГО УРАВНЕНИЯ
Y(k) = -54X(k) - 46X(k-1) - 100X(k-2) +1,04Y(k) – 0,96Y(k-1) - 0,08Y(k-2)
;X – входной сигнал
;Y – выходной сигнал
i_port EQU 11h; номер порта для чтения
o_ port EQU 12h; номер порта для записи
A1 EQU -54; постоянные
A2 EQU - 46; коэффициенты
A3 EQU -100; разностного
B1 EQU 1,04; уравнения
B2 EQU - 0,96;
B3 EQU - 0,08;
X0, X1, X2 DB 0; выделение памяти под
;переменные X(k), X(k-1), X(k-2)
Y0, Y1, Y2 DB 0; выделение памяти под
;переменные Y(k), Y(k-1), Y(k-2)
;т. о. вычисляем значение
;выражения
Y(K) = A1*X1+ A2*X2+ A3*X3+B1*Y1+ B2*Y2+ B3*Y3
start: ;метка начала цикла коррекции
in al, i_port; читаем из порта данные
mov X1, a1;
mul a1, A1; вычисление слагаемого A1*X1
mov b1, a1; сохранение результата в b1
; в результате имеем A1*X1 в регистре b1
mov a1, X2; вычисление
mul a1, A2; слагаемого A2*X2
add b1, al; и вычитание из предыдущего результата
; в результате имеем A1*X1+A2*X2 в регистре b1
mov a1, X3; вычисление
mul a1, A3; слагаемого A3*X3
add b1, a1; и вычитание из предыдущего результата
; в результате имеем A1*X1+ A2*X2+ A3*X3 в регистре b1
mov a1, Y1; вычисление
mul a1, B1; слагаемого B1*Y1
add b1,a1; и вычитание из предыдущего результата
mov a1, Y2; вычисление
mul a1, B2; слагаемого B2*Y2
add b1, a1; и вычитание из предыдущего результата
mov a1, Y3; вычисление
mul a1, B3; слагаемого B3*Y3
add b1, a1; и вычитание из предыдущего результата
; в регистре b1 имеем результат вычисления всего выражения
mov Y3,Y2; сохранение значений
mov Y2,Y1; для следующего
mov Y1, b1; такта
mov X3,X2; сохранение значений
mov X2,X1; для следующего
mov X1, a1; такта
out o_port, b1; вывод управляющего сигнала из b1
jmp start; зацикливание из начала программы
Блок схема алгоритма коррекции приведена ниже:

Рисунок 11 – Блок-схема алгоритма коррекции.