

3 Расчет датчика обратной связи
Soliphant - датчик предельного уровня используемый для измерения уровня жидкостей в емкостях. Черты и преимущества: не требуется калибровка; быстрый и экономный запуск; невосприимчив к наростам – не требует обслуживания; без механически подвижных частей – отсутствие износа, длительная эксплуатация; различные электронные вставки – оптимальная адаптация к производственному процессу; индикация состояния светодиодом – простота контроля.
Конструктивно датчик выполнен в форме камертона (вилки), одна из половин которого служит источником колебаний, генерируемых пьезокристаллом, а вторая - приемником.
Эквивалентная схема пьезорезонатора, показана на рисунке 4.

С1 – динамическая емкость пьезорезонатора; L1 – динамическая индуктивность пьезорезонатора; R1 – динамическое сопротивление пьезорезонатора; С0 – статическая емкость пьезорезонатора.
Рисунок 4 – Эквивалентная схема ненагруженного пьезорезонатора
L1 соответствует собственной массе пластинки, C1 представляет собой механическую эластичность кварца, R1 энергетические потери в результате внутреннего трения и сопротивления механических держателей кварцевой пластинки, C0 межэлектродная емкость. Необходимо отметить, что элементы C1, R1, L1 оказывают существенные влияния на АЧХ резонатора вблизи резонансной частоты, тогда как вклад C0 постоянен. Кварцевая пластинка нагружена дополнительной массой и находится в контакте со средой, лишенной вязкости (вилка из нержавеющей стали), следовательно, лишь ничтожная часть кинетической энергии будет рассеиваться, а переход ее в потенциальную будет практически несущественным. Ввиду вышесказанного не возникнет никаких дополнительных комплексных сопротивлений в схеме и ее вид не изменится.
Импеданс резонатора можно определить по формуле:
![]() ,
(17)
,
(17)
где
![]() -
обобщенная расстройка кварцевого
генератора;
-
обобщенная расстройка кварцевого
генератора;
![]() – частота
последовательного резонанса, Гц;
– частота
последовательного резонанса, Гц;
![]() – рабочая
частота резонатора, Гц;
– рабочая
частота резонатора, Гц;
![]() -
добротность резонатора;
-
добротность резонатора;
![]() -
отношение сопротивления потерь к
реактивному сопротивлению емкости.
-
отношение сопротивления потерь к
реактивному сопротивлению емкости.
Известно, что
![]() .
(18)
.
(18)
Динамическое сопротивление R1 кварцевых резонаторов изменяется в интервале от нескольких Ом до сотен кОм в зависимости от частоты, номера гармоники, конструкции держателя резонатора и других конструктивных факторов. Динамическая емкость C1 изменяется в диапазоне от 5 до 25 пФ по основной гармонике и от 2 до 5 пФ для более высоких гармоник. Динамическая индуктивность L1 варьируется в диапазоне от сотен и тысяч генри для низких частот до нескольких мГн для высоких частот. Исходя, из вышесказанного подберем параметры и произведем расчет:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Следовательно, отношение сопротивления потерь к реактивному сопротивлению емкости:
![]() (Ом·Ф),
(Ом·Ф),
![]() ,
,
![]() .
.
Следовательно, для импеданса можем записать:
![]() Ом.
Ом.
Эквивалентные последовательные реактивная и активная:
 (Ом),
(19)
(Ом),
(19)
 (Ом).
(20)
(Ом).
(20)
Помимо вышеприведенных характеристик пьезорезонатора, он обладает шероховатостью – дополнительной массой, распределенной по пластинке, которая физически являет собой кинетическую энергию, запасаемую в синхронно движущейся вместе со слоем кварцевой пластинки среде. Однако, пьезорезонатор жестко закреплен в металлической вилке, поэтому величина шероховатости будет ничтожно мала по сравнению с рассчитанными величинами (L1,R1).
В результате проведенного расчета мы получили высокую стабильность частоты, вариации которой зависят только от модулирующего воздействия. Стабильность частоты колебаний определяется как параметрами резонатора, так и особенностями других компонентов схемы генератора. Наряду с высокими полученными показателями стабильности частоты колебаний в основу рационального выбора схемы было положено и общие требования обеспечения высокой надежности: устойчивое существования колебаний заданной частоты, мягкий режим возбуждения колебаний, устранение возможности генерации паразитных колебаний.
4 РАСЧЕТ ПЕРЕДАТОЧНОЙ ФУНКЦИИ СИСТЕМЫ, АНАЛИЗ
УСТОЙЧИВОСТИ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
СМЕШИВАНИЯ РАСТВОРОВ
4.1 Расчет передаточной функции системы автоматического управления смешивания растворов
На рисунке 1 отображена структурная схема САУ смешивания растворов. Найдём передаточную функцию системы в общем виде:
 ,
(21)
,
(21)
где
![]() - передаточная
функция двигателя;
- передаточная
функция двигателя;
![]() -
передаточная функция насоса;
-
передаточная функция насоса;
![]() -
передаточная функция смесителя;
-
передаточная функция смесителя;
![]() -
передаточная функция датчика уровня.
-
передаточная функция датчика уровня.
Подставив полученные ранее передаточные функции всех элементов системы и, упростив выражение с помощью программы MathCad, получим передаточную функцию САУ смешивания растворов:
![]() .
(22)
.
(22)
Воспользовавшись программой MathCad, построим график переходного процесса, изображенного на рисунке 5. По графику переходного процесса определим прямые оценки качества системы:
Максимальное значение переходного процесса: hmax=0.22
Установившееся значение переходного процесса: hуст=0.15
Значение
перерегулирования:![]() .
.
0.3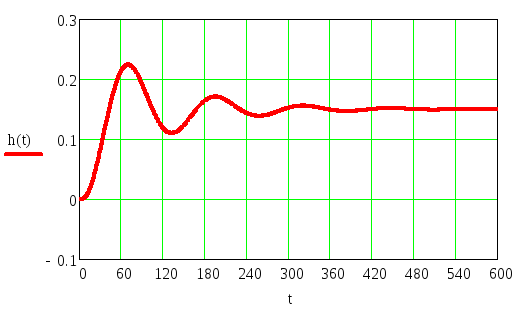
hmaxmaxmax
0.2

hуст h(t)




0.1
0
tmax
tперех
tсогл
-0.1
t,
c
0
60 120 180 240 300 360 420 480 540 600
Рисунок 5 – График переходного процесса САУ смешивания растворов
Время
переходного процесса
![]() - время регулирования системы; определяется
как интервал времени от момента приложения
какого-либо воздействия до времени
вхождения в пятипроцентную трубку (
- время регулирования системы; определяется
как интервал времени от момента приложения
какого-либо воздействия до времени
вхождения в пятипроцентную трубку (![]() ).
tперех=280
c.
).
tперех=280
c.
Время достижения макс. значения переходного процесса: tmax=70 с.
Время
первого согласования
![]() -
время, за которое регулируемая величина
первый раз достигает своего установившегося
значения.
-
время, за которое регулируемая величина
первый раз достигает своего установившегося
значения.
![]() =
515 с.
=
515 с.
Колебательность n – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние: n=4.
По переходному процессу видно (рисунок 5), что система является устойчивой, Прямые оценки качества системы не удовлетворяют техническому заданию. При разработке данной системы допускается 5% несовпадение заданных значений и полученных в ходе анализа графика переходного процесса. Следовательно, система требует коррекции.
Построим амплитудно-частотную характеристику для того, чтобы определить косвенные оценки качества системы. Для того, чтобы определить амплитудно-частотную характеристику системы, необходимо в передаточной функции W(p) p заменить на jω. Затем знаменатель уравнения помножить на сопряженное выражение, а потом выделить действительную и мнимую части из полученного выражения по формулам определить амплитудно-частотную характеристику, то есть:
![]() .
.
Построим амплитудно-частотную характеристику (рисунок 6), используя прикладную программу MathCad.
ω,
Гц
ωр
А(0)
Аmax 0.4






0.3
А(0)
0.1
ωcр

0
0.05 0.1 0.15 0.2
Рисунок 6 – Амплитудно-частотная характеристика системы автоматиче-
ского управления смешивания растворов
По графику амплитудно-частотной характеристики определим косвенные оценки качества САУ смешивания растворов:
![]() – максимальная
амплитуда.
– максимальная
амплитуда.
![]() – амплитуда
при нулевой частоте.
– амплитуда
при нулевой частоте.
Показатель
колебательности:
![]() .
.
![]() – резонансная
частота (частота, при которой АЧХ
достигает максимального значения).
– резонансная
частота (частота, при которой АЧХ
достигает максимального значения).
![]() – частота
среза.
– частота
среза.
![]() – полоса
пропускания (полоса, при которой значение
амплитуды больше, чем
– полоса
пропускания (полоса, при которой значение
амплитуды больше, чем
![]() ).
).
![]() =125.6
– период колебаний.
=125.6
– период колебаний.
![]() – величина
перерегулирования.
– величина
перерегулирования.
![]() =157
с;
=157
с;
![]() =376.8
с – время регулирования.
=376.8
с – время регулирования.
![]() .
.
![]() с.
с.