

3. Построение решения в Mathcad
3.1. Построение переходной и весовой функции
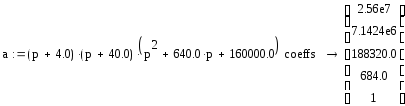
Построим переходную и весовую функцию искомой системы. Зададим коэффициенты передаточных функций:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Зададим структуру передаточных функций:
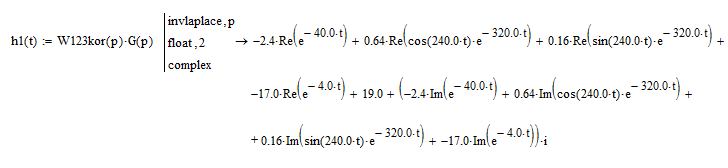
Построим переходную функцию блока W1(p), используя обратное преобразование Лапласа (рис.24):
![]()
![]()

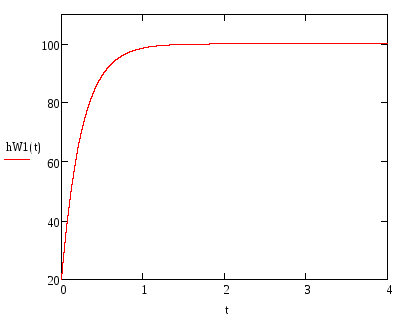
Рис.24. Переходная функция блока W1(p)
Построим переходную функцию блока W2(p), используя обратное преобразование Лапласа (рис.25):

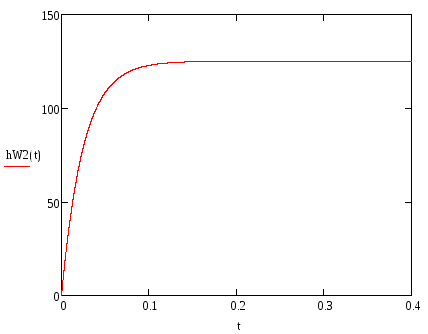
Рис.25. Переходная функция блока W1(p)
Построим переходную функцию блока W3(p), используя обратное преобразование Лапласа (рис.26):

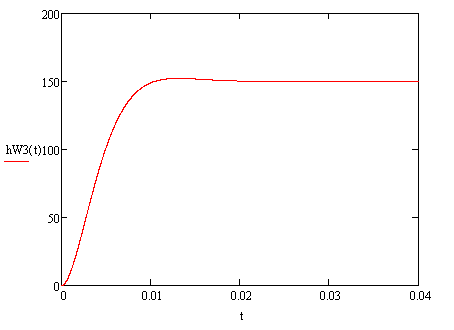
Рис.26. Переходная функция блока W3(p)
Так как у нас дано последовательное соединение передаточных функций, то общая передаточная функция исходной системы есть произведение данных передаточных функций.
![]()
![]()
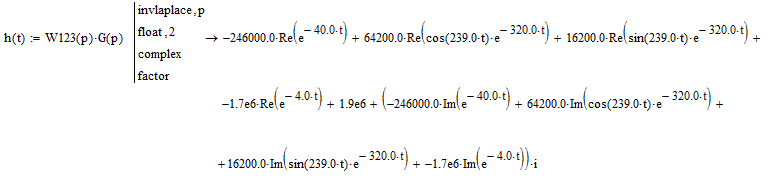
Построим переходную функцию общей передаточной функции исходной системы, используя обратное преобразование Лапласа.
![]()
Получим график (рис.27):
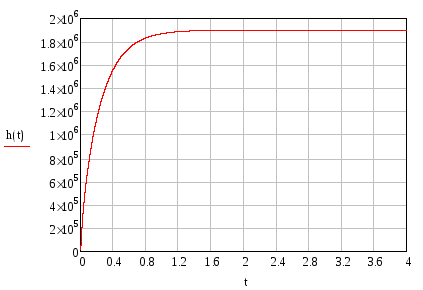
Рис. 27. Переходная функция исходной системы
Построим весовую функцию указанной системы, используя обратное преобразование Лапласа:

Получим график (рис.28) :
![]()
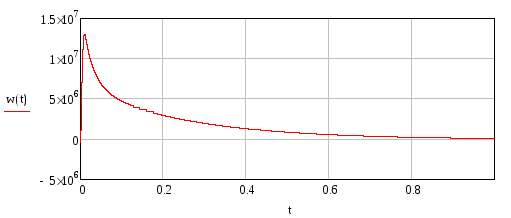
Рис.28. Весовая функция исходной системы
3.2. Анализ устойчивости
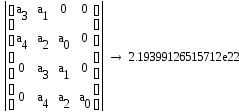
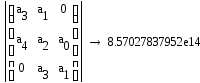
Исследуем на устойчивость систему с помощью матрицы Гурвица. Для этого построим и найдем 4 главных диагональных минора матрицы Гурвица, которая составлена из коэффициентов многочлена знаменателя.
![]()
Определяем коэффициенты знаменателя:
Проверяем устойчивость системы по критерию Гурвица:

![]()
Все диагональные миноры положительны, следовательно, данная динамическая система устойчива.
3.3. Коррекция системы
Как видно, процесс имеет большую амплитуду. Внесем некоторые корректировки в исходную систему, чтоб уменьшить амплитуду:
Добавим усилительное звено с параметром k0=0.00001, тогда получим:
![]()
![]()
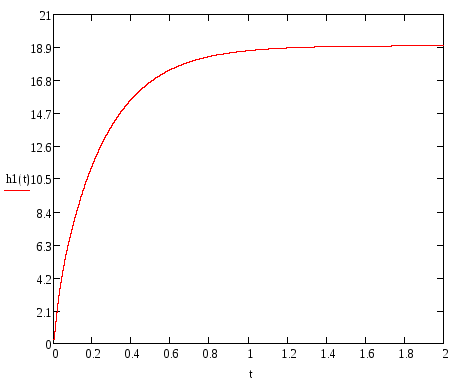
Рис. 29. Переходная функция корректированной системы
3.4. Перерегулирование
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Итак, мы нашли
перегулирование
 .
.
Время переходного
процесса равно
 .
.
3.5. Нули и полюса системы
Найдем нули и полюсы системы:
![]()

Система имеет нуль(z) и 4 комплексных полюса (p).
3.6. Частотные характеристики
Построим логарифмическую амплитудно-частотную характеристику (ЛАЧХ) и логарифмическую фазо-частотную характеристику новой системы (ЛФЧХ).
Асимптотические АЧХ звеньев
![]()
![]()
![]()
![]()
![]()
Построим графики ЛАЧХ данных звеньев:

Рис. 30. ЛАЧХ простейших составных звеньев
Составим сумму простейших составных звеньев, чтобы она наилучшим образом аппроксимировала имеющуюся ЛАЧХ новой системы.
![]()
Построение ЛAЧХ исходной разомкнутой системы
![]()
![]()
![]()
![]()
На графике представлены исходная и асимптотическая ЛАЧХ системы:
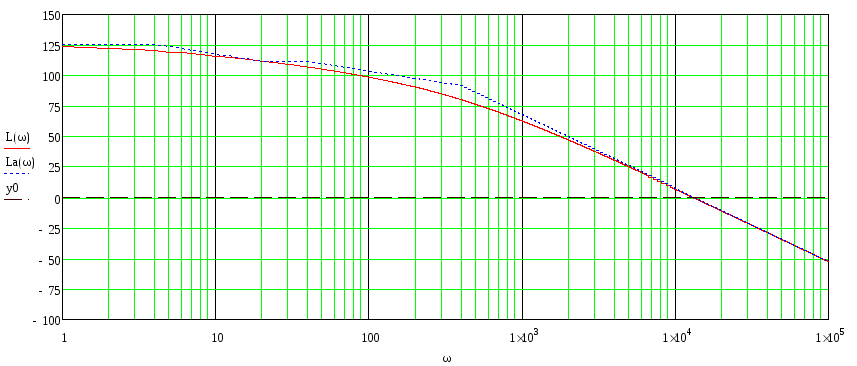
Рис 31. Исходная и асимптотическая ЛАЧХ системы
Построим логарифмическую фазо-частотную характеристику исходной системы (ЛФЧХ).

![]()

![]()
![]()
Получим график:
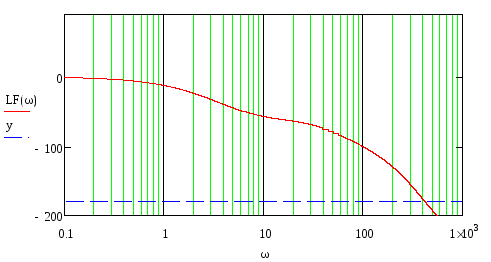
Рис.32. ЛФЧХ исходной системы
3.7. Построение желаемых частотных характеристик
Переход с низкочастотного участка на среднечастотный происходит на частоте w=796 rad/sec, а переход со среднечастотного участка на высокочастотный – на частоте 3960 rad/sec.
Учитывая, что перерегулирование должно
быть меньше 30%, запас устойчивости
порядка 15дБ, то можно получить передаточную
функцию желаемой
ЛАЧХ.

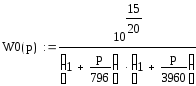
Построим временные характеристики полученной системы:

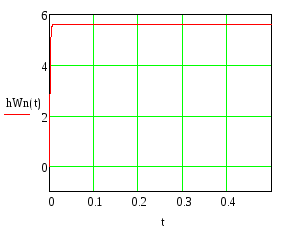
Рис.33. Переходная функция полученной системы


Рис. 34.Весовая функция полученной системы
Далее, построим логарифмическую амплитудно-частотную характеристику желаемой системы:
![]()
![]()
Рис. 35.ЛАЧХ желаемой системы.
Построим ЛФЧХ желаемой системы:

![]()
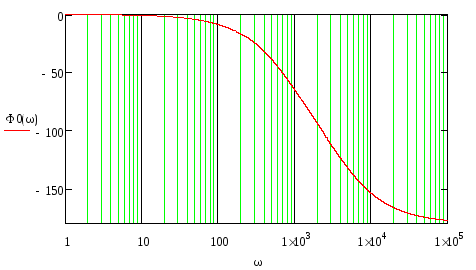
Рис. 36. ЛФЧХ желаемой системы.