

курсовая работа / teoriya_avtomaticheskogo_upravleniya
.pdfМинистерство образования и науки Украины Одесский национальный политехнический университет
Кафедра электромеханических систем с компьютерным управлением
ОТЧЕТ
к курсовой работе по ТАУ
Выполнил:
студент группы ЭМ061 Гогуленко А.М.
Вариант: №3
Руководитель: Мельникова Л.В.
Одесса 2009

ЧАСТЬ ПЕРВАЯ
1. Синтез САУ с помощью ЛАЧХ
1.1.Задание
Спомощью ЛАЧХ определяем схему и параметры корректирующей цепи при последовательной коррекции для обеспечения заданных показателей качества:
перерегулирование s и времени переходных процессов tp. Определить реальные запасы стойкости после коррекции.
Передаточная функция заданной разомкнутой системы:
Ho(P) =
где К - коэффициент усиления, V - порядок астатизма,
n - порядок апериодичности звена.
K
n
,
PV × ∏(T1 × P +1)
i =1
1.2.Исходные данные согласно варианту 3
Таблица 1. Исходные данные (Вариант 3)
|
s ,% |
tp, C |
v |
|
|
k |
|
T1, C |
|
T2, C |
|
T3,C |
T4, C |
|
|
25 |
1.0 |
2 |
|
|
400 |
|
0.36 |
|
0.045 |
0 |
0 |
||
Частотная передаточная функция исходной разомкнутой системы |
|
|||||||||||||
|
|
Ho( p) = |
|
|
|
k |
|
|
|
, |
|
|
||
|
|
|
|
|
|
|||||||||
|
|
|
p ×(T × p +1) ×(T × p +1) ×(T × p +1) |
|
|
|
||||||||
|
|
|
|
1 |
|
2 |
|
3 |
|
|
|
|
|
|
|
|
Ho( jW) = |
|
|
|
400 |
|
|
|
, |
|
|
||
|
|
|
|
|
|
|||||||||
|
|
|
jW ×(0.36 × jW +1) ×(0.045 × jW +1) |
|
|
|
||||||||
1.3.Построение ЛАЧХ исходной системы
Выражение для ЛАЧХ
L0 (W) = 20 lg(K ) - 20 lg W - 20 lg(
 T12W2 +1) - 20 lg(
T12W2 +1) - 20 lg(
 T22W2 +1) - 20 lg(
T22W2 +1) - 20 lg(
 T32W2 +1)
T32W2 +1)
Частоты сопряжения
W1= 1/ Т1 = 1/ 0.0075=133.33 s-1 , W2= 1/ Т2 = 1/ 0.03=33.33 s-1, W3= 1/ Т3 = 1/ 0.15=6.67 s-1,
1.4.Построение желаемой ЛАЧХ
По этим данным строится ЛАЧХ разомкнутой исходной системы, показанной на рис.4. Синтез ЛАЧХ скорректированной системы осуществляется, исходя из следующих
соображений. Так как область средних частот в зоне частоты среза определяет качество переходного процесса, то определение параметров этой зоны является основным этапом в синтезировании.
Лист
Изм. Лист |
№ докум. |
2 |
Подпись Дата |
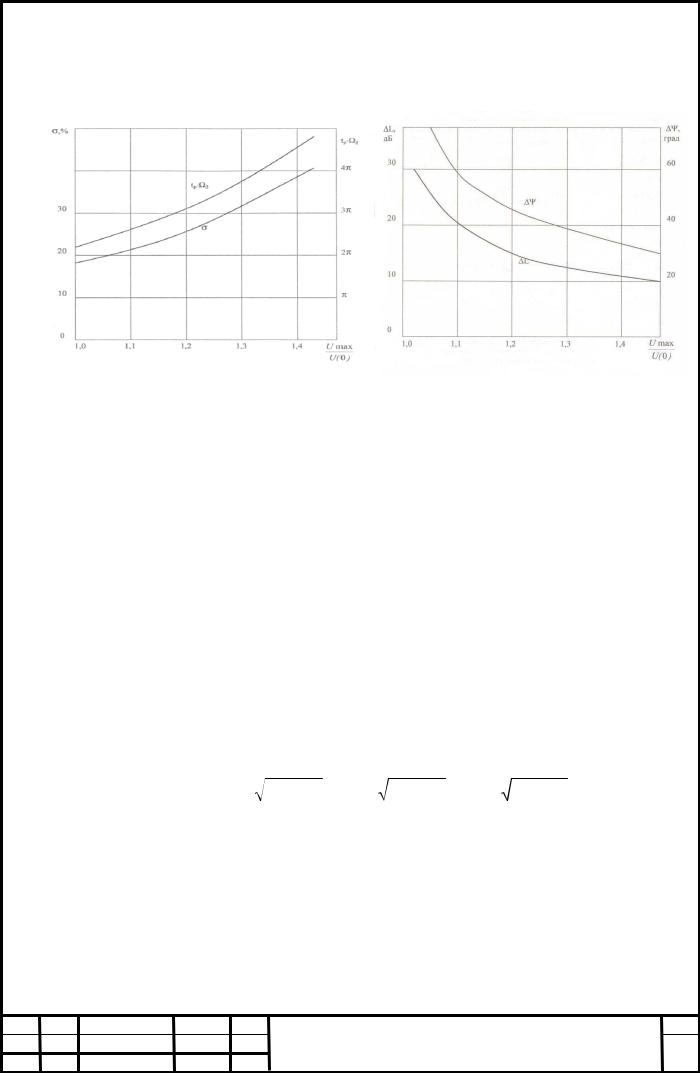
Определяем требуемую частоту среза по рис.1. связывающего σ и tp с Umax ВЧХ и частотой среза Ωср.
Рис. 1. Номограммы расчета запасов стойкости за |
Рис. 2. Номограммы для расчета частоты среза |
модулем ( L) и фазой (ΔΨ) для известного |
скорректированной САР, которая обеспечивает |
максимально допустимого значения Umax |
заданные показатели качества |
|
Таким образом, по заданному значению σ определяется Umax, а по нему из второй кривой коэффициент b = 3.05, который связывает время регулирования и частоту среза
Ωcp = π ×b , |
Ωcp = |
3.14 ×3.05 |
= 19.16 s−1 . |
|
|||
tp |
0.5 |
|
|
Наклон участка делается (–20dB/ дек), так как этот наклон обеспечивает наименьшую колебательность систем, и проводится до значения амплитуд (положительных и отрицательных) не менее L, для обеспечения запаса устойчивости.
Запас устойчивости по амплитуде ( L) и по частоте(Δψ) иходя из величины Umax по кривым из рис.2.
В области низких частот обе характеристики должны совпадать для обеспечения требуемого значения ошибки.
Область высоких частот практически не влияет на качество системы, и поэтому большого совпадения исходной и скорректированной характеристиками не требуется.
Исходя из всего вышеперечисленного построена ЛАЧХ скорректированной системы, показанной на рис.4. и будет определена следующим выражением:
L(Ω) = 20 lg K − 20 lg Ω − 20 lg(
 T52Ω2 +1) + 20 lg(
T52Ω2 +1) + 20 lg(
 T42Ω2 +1) − 60 lg(
T42Ω2 +1) − 60 lg(
 T12Ω2 +1)
T12Ω2 +1)
где:
T |
= |
1 |
= |
1 |
|
= 4.76 s |
|
Ω5 |
|
|
|||||
5 |
|
|
|
0.21 |
|||
|
|
|
|
||||
T |
= |
1 |
|
= |
1 |
= 0.29 s |
|
Ω4 |
|
|
|||||
4 |
|
|
|
3.5 |
|
|
|
|
|
|
|
|
|
||
Лист
Изм. Лист |
№ докум. |
3 |
Подпись Дата |
|
1.5. Нахождение передаточной функции корректирующего звена |
|
||||||||
|
Передаточная функция корректирующего звена, определяется графически вычитанием из |
|||||||||
ЛАЧХ скорректированной системы ЛАЧХ исходной системы. Или по выражению |
||||||||||
|
|
|
|
|
|
|
Lк = L - L0 |
|
|
|
|
|
L = 20 lg K - 20 lg W - 20 lg( |
T 2W2 +1) + 20 lg( |
T 2W2 +1) - 60 lg( |
T 2W2 +1) - |
|||||
|
|
к |
|
|
|
5 |
|
|
4 |
1 |
|
|
-(20 lg(K ) - 20 lg W - 20 lg( |
T 2W2 |
+1) - 20 lg( |
T 2W2 +1) - 20 lg( |
T 2W2 +1)) |
||||
|
|
|
|
|
|
1 |
|
|
2 |
3 |
L = -20 lg( |
T 2W2 +1) + 20 lg( |
T 2W2 +1) - 40 lg( |
T 2W2 +1) + 20 lg( T 2W2 +1) + 20 lg( T 2W2 +1) |
|||||||
к |
|
5 |
|
|
4 |
|
|
1 |
2 |
3 |
|
Передаточная функция корректирующего звена будет выглядеть так: |
|
||||||||
|
Нкз = |
(T2 p +1) ×(T3 p +1) ×(T4 p +1) |
Нкз( p) = |
(0.03 p +1) ×(0.15 p +1) ×(0.29 p +1) |
||||||
|
|
(T p +1) ×(T p +1)2 |
, |
(4.76 p +1) ×(0.0075 p +1)2 |
||||||
|
|
|
|
|
|
|
||||
|
|
|
|
5 |
1 |
|
|
|
|
|
|
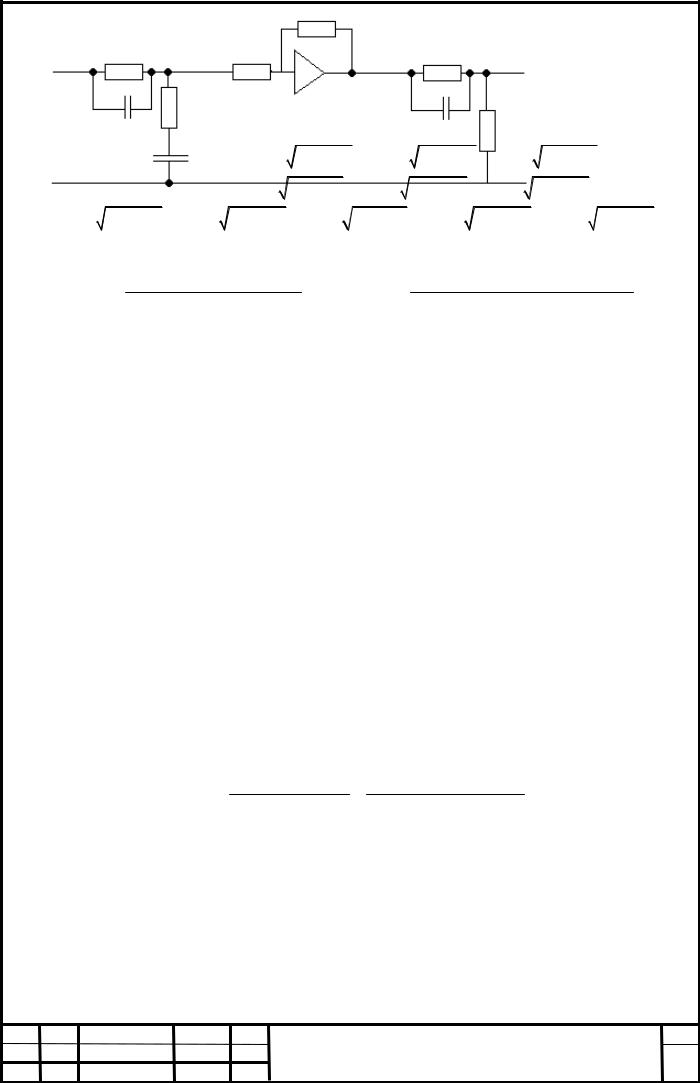
1.6. Техническая реализация корректирующего звена |
|
||||||||
|
Полученное корректирующее звено это сложное звено, техническая реализация которого |
|||||||||
состоит в последовательном соединении типовых звеньев. В данном случае корректирующая |
||||||||||
звена собирается из четырех звеньев на пассивных элементах, и его принципиальная схема |
||||||||||
показана на рис.3 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Roc |
|
|
|
|
|
R1 |
|
R0 |
|
R`1 |
|
|
|
|
|
|
C1 |
R2 |
|
|
|
C` |
R`2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
C`2 |
|
|
|
|
|
|
|
Рис. 3 Принципиальная схема корректирующего звена. |
|
|||||||
|
Первое звено представляет собой интгро-дифференцирующее звено второго порядка, |
|||||||||
остальные пропорциональное и интегро-дифференцирующее первого порядка. |
||||||||||
|
Передаточная функция первого звена |
|
|
|
|
|||||
|
|
|
|
|
(Т4 Р +1) ×(Т3 Р +1) |
(0, 29 р +1)(0,15 р +1) |
|
|||
|
|
|
|
Нк1 = |
(T P +1) ×(T P +1) |
= (4, 76 р +1)(0, 0075 р +1) , |
|
|||
|
|
|
|
|
5 |
1 |
|
|
|
|
|
Выражение, связывающее постоянные времени и параметры элементов |
|||||||||
|
Т4 = R1 C1, |
|
|
|
|
|
|
|
|
|
|
Т3 = R2 C2, |
|
|
|
|
|
|
|
|
|
|
T5 + T1=T4 + T3 + R1 C2 |
|
|
|
|
|
|
|||
|
Так как мы имеем четыре известных и только три неизвестных уравнения, то для |
|||||||||
решения зададимся одним из параметров |
|
|
|
|
||||||
|
Пусть R1 = 2 kW. |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Лист |
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
|
|
|
|
4 |
|
|
|
|
|
|
||||||
C1 = T4 / R1= 0.29 / 2000 = 145 10-6 F,
C2 = (T5 + T1 – T 4 – T 3) / R1 = (4,76 + 0.0075 – 0.29 – 0.15) / 2000 =2.165 10 -3 F, R2 = T3 / C2 = 0.15 / 2,165 10-3 = 69,28 Ω.
Передаточная функция для второго звена
Нк2( p) = k |
(Т |
2 p +1) |
= k |
0, 03 р +1 |
|
, |
(T1 p +1) |
0, 0075 р + |
|
||||
|
|
1 |
||||
Для второго звена выражение, связывающее постоянную времени и параметры элементов
K = T1 = 0.0075 = 0.25, T2 0.03
Задаемся R2 = 1 kΩ
K = 0.25 = |
|
R`2 |
|
|
|
||||||
|
R`1 +R`2 |
|
|||||||||
|
|
|
|
|
|
|
|
||||
R` = |
R`2 |
|
− R` = |
10 |
+10 = 30Ω |
||||||
|
|
|
|||||||||
1 |
0, 25 |
|
|
2 |
0.25 |
|
|||||
|
|
|
|
|
|
|
|||||
C`= |
T2 |
= |
0.03 |
= 10−3 F |
|||||||
|
|
||||||||||
|
R`1 |
|
|
30 |
|
|
|
|
|||
Параметры пропорционального звена
K |
|
= |
1 |
= |
1 |
= 4 |
||
oy |
K |
0.25 |
||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
K |
|
= |
Zoc |
= 4 |
|
|||
oy |
|
|
||||||
|
|
Zвх |
|
|
||||
|
|
|
|
|
||||
Пусть Zвх=500 Ом тогда Zос=2000 Ом
1.7.Определение запасов устойчивости
Для проверки действительных запасов устойчивости скорректированной системой, воспользуемся следствием из критерия Найквиста.
Выражение для ЛФЧХ
Yck(W) = - |
π + arctg(T ×W) - arctg(T ×W) - 3× arctg(T ×W) = |
||||
|
|
2 |
4 |
5 |
1 |
= - π |
|
|
|
, |
|
|
|
|
|
||
+ arctg(0.29 ×W) - arctg(4.76 ×W) - 3× arctg(0.0075 ×W) |
|||||
2 |
|
|
|
|
|
По данному выражению строится ЛФЧХ (см. рис.4 ) Значение фазы при частоте среза Ωср=19,16с-1 Ψ(:) = -2,5рад Запас по фазе ΔΨ = 1,1рад = 63° Запас по фазе определяется при ΩП=74,5с-1:
L = 13
Таблица 2 Точки для построения ЛФЧХ
Ω |
0.1 |
0.3 |
1 |
3 |
10 |
30 |
100 |
50- |
Ψ |
-90 |
-155 |
-157 |
-143 |
-138 |
-137 |
-137 |
-138 |
Лист
|
|
|
5 |
Изм. Лист |
№ докум. |
|
|
Подпись Дата |
|||
ЧАСТЬ ВТОРАЯ
2.Последовательная коррекция
сподчиненным регулированием координат
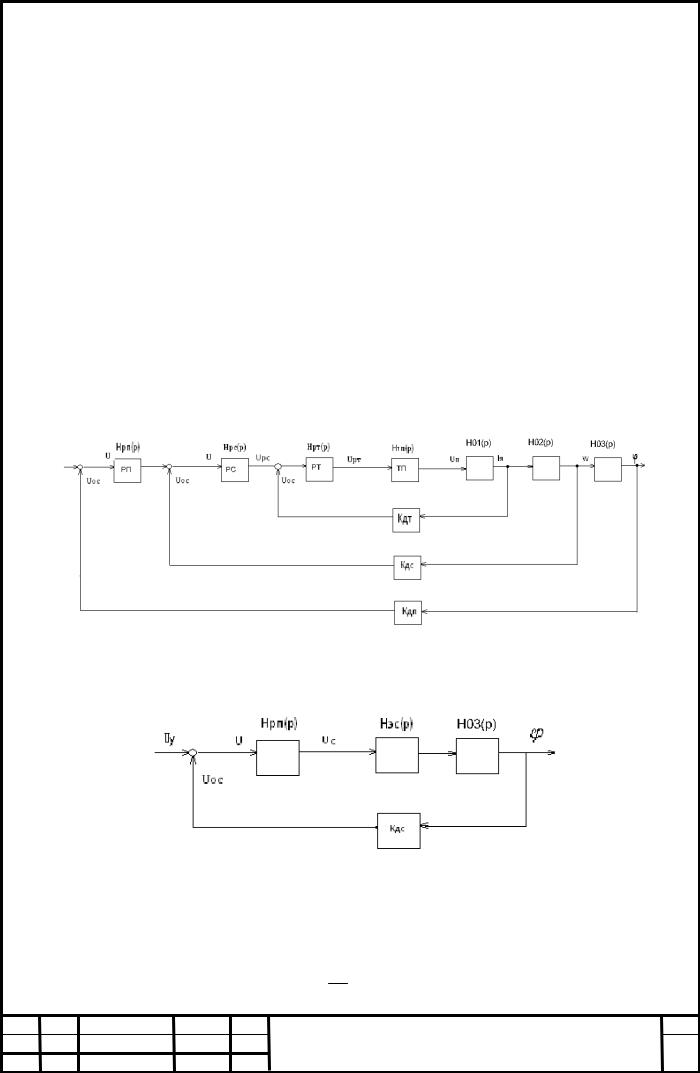
2.1.Задание
Задана трехконтурная САУ (рис. 5), требуется рассчитать регулятор контура перемещения (РП) при настройке на технический оптимум.
2.2.Исходные данные согласно варианту 3
P = 0.37 |
кВт |
U = 110 В |
γ = 3.5 |
|
Kтп = 1.5 |
|
Kϕ = 0.5 В / А |
Kдт = 0.2В / А |
|
Kдс = 0.15Вс |
Kдп = 0.15В |
Iн |
= 5.1 A |
|
n = 1000 |
об / мин |
Rя = 1.99 Ом |
Rдп |
= 1.22 Ом |
Lя = 78 мГн |
Jд = 0.011кг× м2 |
|
|
|
2.3. Схемы
Рис. 5. Трехконтурная схема системы ТП-Д с подчиненным регулированием.
Рис. 6 Структурная схема контура перемещения.
2.4.Определение передаточных функций звеньев системы ТП-Д (рис.5.)
γ= J м ;
Jд
Лист
Изм. Лист |
№ докум. |
7 |
Подпись Дата |

JΣ = γ Jд + Jд = 3.5 ×0.011+ 0.011 = 0.0495 кг× м2
w |
= |
n ×π |
= |
1000 ×3.14 |
|
= 104.72c−1 |
|
|
|||
|
|
|
|
||||||||
n |
30 |
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Cn |
= |
Uн - Iн ×(Rя + Rдп ) |
= |
|
110 - 5.1×(1.99 +1.22) |
= 104.72 |
|||||
|
|
||||||||||
|
|
|
|
wn |
104.72 |
|
|||||
|
|
|
T = |
Lя |
= |
78 ×10−3 |
= 0.024 с |
||||
|
|
|
|
|
|
||||||
|
|
|
я |
Rя + Rдп |
1.99 +1.22 |
|
|
||||
|
|
|
|
|
|
|
|||||
Запишем передаточные функции отдельных звеньев рис. 5
Hтп ( р) = |
|
Ктп |
|
= |
|
1.5 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Tн р +1 0, 01р +1 |
|
||||||||
Н01 |
( р) = |
1 |
|
|
|
= |
|
|
|
1 |
||
|
|
|
|
|
|
|
|
|
|
|||
Rя (Тя р +1) |
|
|
|
|
||||||||
|
|
1.99(0.024 р +1) |
||||||||||
Н02 |
( р) = |
|
С |
= |
0.894 |
|
|
|
|
|||
|
|
0.0495 р |
|
|||||||||
|
|
JΣ р |
|
|||||||||
Н03 ( р) = Кϕ = 0.5 ;
рр
2.5.Определение передаточной функции звена регулятора положения (рис.6.)
Передаточная функция Нэс(р) определяется как передаточная функция части системы замкнутой по скорости после введения корректирующих звеньев по току и по скорости.
Нэс |
( р) = |
|
|
1 Кдс |
|
|
|
; |
|
8Т |
3 р3 |
+ 8Т2 |
р2 |
+ 4Т |
|
|
|||
|
|
н |
р +1 |
||||||
|
|
н |
|
н |
|
|
|
|
|
Передаточная функция разомкнутого контура перемещения до коррекции на модульный
оптимум :
|
Н0 ( р) = Нэс ( р) × Н03 ( р) × Кдп = |
|
Кϕ Кдп |
|
|
; |
|
|||||
|
Кдс р(8Тн3 р3 + 8Тн2 р2 + 4Тн р +1) |
|
||||||||||
Желаемая передаточная функция: |
|
|
|
|
|
|
|
|||||
|
|
|
1 |
|
|
|
|
|
|
|
||
|
|
|
Н( р) = |
|
|
; |
|
|
|
|
||
|
|
|
8Тн р (8Тн3 р3 + 8Тн2 р2 + 4Тн р +1) |
|
|
|
|
|||||
Передаточную функцию регулятора перемещения получаем: |
|
|
|
|
||||||||
|
Н( р) |
Кдс р(8Тн3 р3 + 8Тн2 р2 + 4Тн р +1) |
|
Кдс |
|
0,15 |
|
|||||
Нрс ( р) = |
|
= |
|
= |
|
= |
|
= 25В |
||||
Н0 ( р) |
Кϕ Кдп8Тн р (8Тн3 р3 + 8Тн2 р2 + 4Тн р +1) |
8ТнКдпКϕ |
8 ×0, 01×0,15 ×0,5 |
|||||||||
Нрс ( р) = K = 25B
Регулятор оказался пропорциональным звеном.
2.6.Нахождение технических параметров регулятора положения:
Регулятор положения является пропорциональным звеном (см. п. 2.5.). Техническая реализация пропорционального звена возможна с помощью операционного усилителя рис. 7.
Лист
Изм. Лист |
№ докум. |
8 |
Подпись Дата |

|
|
|
|
|
|
Рис. 6 Электрическая схема Регулятора перемещения. |
|
|
|
|
|
|
|
|
|||||||||||||||
|
Koy |
= 1 = 1 |
= 0.04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
K |
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Koy |
= Roc |
= 0.04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Rвх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пусть Rвх=60 Ом тогда Rос=1500 Ом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
2.7. Построение ЛАЧХ и ЛФЧХ системы до и после коррекции и ЛАЧХ регулятора |
||||||||||||||||||||||||||||
|
|
перемещения (рис. 7) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Передаточные функции звеньев до и после коррекции имеют следующее выражение |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(8Тн3 р3 + 8Тн2 р2 + 4Тн р +1); |
|
|
|
|
|
|
|
|
|||||||
|
Для построения ЛАЧХ и ЛФЧХ разложим данное выражение на две составляющие: |
||||||||||||||||||||||||||||
|
|
|
|
|
|
(8Тн3 р3 + 8Тн2 р2 + 4Тн р +1) = (4Тн2 р2 + 2Тн р +1)(2Тн р +1); |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
1 |
|
= |
|
1 |
|
= 50c−1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
2Тн |
|
2 |
×0, 01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Wp |
= |
1 |
|
= |
|
|
|
1 |
= 70, 71c−1; |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
2Тн |
|
2 ×0, 01 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
ЛАЧХ САУ до коррекции: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
КдпКϕ |
|
- 20 lg(W) - |
20 lg |
2 |
W |
2 |
|
2 |
2 |
) |
2 |
+ 4Тн |
2 |
W |
2 |
||||||||||
|
L0 (W) = 20 lg |
Кдс |
|
4Тн |
|
+1 - 20 lg (1- 4Tн W |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
КдпКϕ |
|
|
0, 5 ×0,15 |
= -6.02дБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
20 lg |
|
= 20 lg |
0,15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Кдс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Wс0 = 0, 5c−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ЛАЧХ САУ после коррекции: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
4Тн |
2W2 +1 - 20 lg (1- 4Tн2W2 )2 + 4Тн |
2W2 |
|
|
|
||||||||
|
L(W) = 20 lg |
|
- 20 lg(W) - 20 lg |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
8Tн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 lg 1 |
= 20 lg |
1 |
= 21.9дБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
8Tн |
|
|
|
0, 08 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wс |
= 13c−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЛАЧХ регулятора перемещения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Lpп |
(W) = |
|
|
|
Кдп |
|
|
= 20 lg |
|
|
|
0,15 |
|
|
|
= 27,96дБ |
|
|
|
|
|
|
|
|
||||
|
20 lg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
8TнКдсКϕ |
|
|
|
|
|
8 ×0, 01×0,15 ×0,5 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лист |
Изм. |
Лист |
№ докум. |
Подпись |
|
Дата |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ЛФЧХ до коррекции и после коррекции имеет один и тот же вид в виду того что регулятор перемещения - пропорциональное звено:
|
При Ω < Ωp : |
|
|
|
Ψ(Ω) = − |
π |
− arctg 2Тн |
Ω − arctg |
2ТнΩ |
; |
|
|
|
|
|
|
||||||||||||
|
|
|
|
2 |
1−4Т 2 |
Ω2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
При Ω > Ωp : |
|
|
Ψ(Ω) = − |
π |
− arctg 2Тн |
Ω−π + arctg |
|
2ТнΩ |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
; |
|
|
|
||||||||||||||||
|
|
2 |
4Т |
2Ω2 |
−1 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
||
|
Ω |
π |
= 38c−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3 Данные для построения ЛФЧХ. |
|
|
|
|
|
|
|
|
|
||||||||||
|
Ω, |
|
|
0 |
|
:с0 |
|
1 |
|
3 |
6 |
|
10 |
|
:с |
|
30 |
|
|
:π |
|
|
60 |
100 |
300 |
∞ |
||
|
1/с |
|
|
|
|
=0,5 |
|
|
|
|
|
|
|
|
=13 |
|
|
|
|
=38 |
|
|
|
|
|
|
|
|
|
Ψ, град. |
-π/2 |
|
-1,59 |
|
-1,61 |
-1,69 |
-1,81 |
-1,97 |
|
-2,09 |
|
-2,86 |
|
-π |
|
|
-4,36 |
-5,23 |
-5,94 |
-2π |
|||||||
|
На рис. 7 построены ЛАЧХ и ЛФЧХ САУ до и после коррекции и ЛАЧХ регулятора |
|
||||||||||||||||||||||||||
перемещения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Запасы устойчивости до коррекции: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
L0 = 36,5; |
|
ΔΨ0 |
=1, 6 рад = 91, 6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Запасы устойчивости после коррекции: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
L=10дБ; |
|
ΔΨ =1, 05 рад = 60, 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
3.Выводы:
Впервой части курсовой работы для заданной системы чтобы обеспечить необходимые показатели качества было сделано:
Построена ЛАЧХ системы до коррекции;
Определен наклон и частота среза области средних частот желаемой ЛАЧХ
иопределены ожидаемые при этом запасы устойчивости. Построена желаемая ЛАЧХ;
Определено корректирующее звено и найденные его параметры.
Определены Запасы устойчивости после коррекции.
Врезультате скорректированная система обладает заданными показателями качества, что подтверждает тот факт, что реальный запас устойчивости практически совпадает с ожидаемым. Это говорит о том, что метод синтеза САУ с помощью ЛАЧХ обладает удовлетворительной точностью, имея при этом такие преимущества как наглядность и простоту.
Во второй части роботы проведена коррекция контура положения на модульный оптимум системы с подчиненным регулированием.
Система с подчиненным регулированием координат с последовательной коррекцией дает возможность раздельного регулирования нескольких координат и раздельную (оптимальную) настройку качества процесса регулирования.
Согласно техническому оптимуму были определены передаточные функции системы исходной и желаемой и найдена передаточная функция регулятора перемещения с помощью которого компенсируются большие постоянные времени, что уменьшает время регулирования. Регулятор перемещения оказался П-звеном, и были найдены его параметры.
Построенные ЛАЧХ и ЛФЧХ до и после коррекции позволили увидеть, что после коррекции запас устойчивости по фазе и амплитуде уменьшились.
Лист
|
|
|
10 |
Изм. Лист |
№ докум. |
|
|
Подпись Дата |
|||

4.Список литературы
1.Попович М.Г., Ковальчук О.В. Теорія автоматичного керування. – К.: Либідь, 1997. – 544 с.
2.Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. –
М.: Наука, 1975. – 768 с.
3.Повышение качества систем автоматического управления. Учеб. пособие/ Р.П. Герасимяк. – К.: УМК ВО, 1992. – 100 с.
4.Булгар В.В. Теорія електроприводу: збірник задач. – Одеса: Поліграф, 2006. – 408 с.
Лист
|
|
|
11 |
Изм. Лист |
№ докум. |
|
|
Подпись Дата |
|||