

курсовая работа / tau_chast_2
.doc
Министерство общего и профессионального
образования Российской Федерации.
Пермский Государственный Технический Университет
Чайковский филиал
Кафедра Микропроцессорных средств автоматизации
КУРСОВОЙ ПРОЕКТ
по дисциплине «теория автоматического управления»
Таблица № 1, Вариант № 2
Выполнил: студент группы
Проверил: доцент кафедры МСА
Содержание.
-
Анализ исходной непрерывной системы.
-
Синтез непрерывной системы методом ЛАЧХ.
-
Синтез непрерывной системы с модальным регулятором.
-
Синтез цифровой системы по критерию быстродействия.
-
Дополнительные исследования цифровой системы.
Задание по курсовому проектированию:
С татическая
система:
татическая
система:
Параметры и требуемые показатели качества:


![]()
Минимальный
запас устойчивости
![]()
-
Анализ исходной непрерывной системы.
Объект управления задан структурной схемой:

В соответствии со структурной схемой передаточная функция статической системы в разомкнутом состоянии имеет вид:

Передаточная функция замкнутой системы имеет вид:
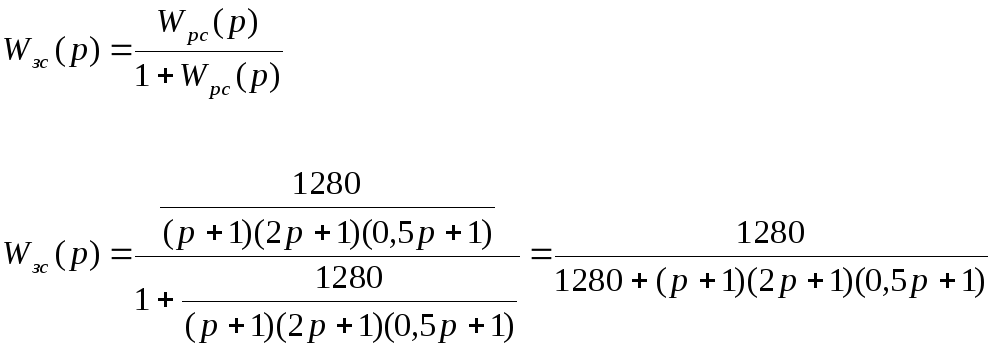
Определим устойчивость системы по критерию Гурвица:
Система автоматического управления будет устойчивой тогда и только тогда, когда при положительном старшем коэффициенте характеристического уравнения все определители матрицы Гурвица будут положительными.



Условия:

Система не устойчива.
График переходного процесса, исходной непрерывной системы (объекта) Приложение 1
-
Синтез непрерывной системы методом ЛАЧХ.
1. Определим координаты ЛАЧХ объекта:
Так как система астатическая, то начальный участок ЛАЧХ имеет наклон
-20 дБ/дек., проходящий через точку
![]()

![]()
-
Определим координаты желаемой ЛАЧХ (из графика зависимости рис):
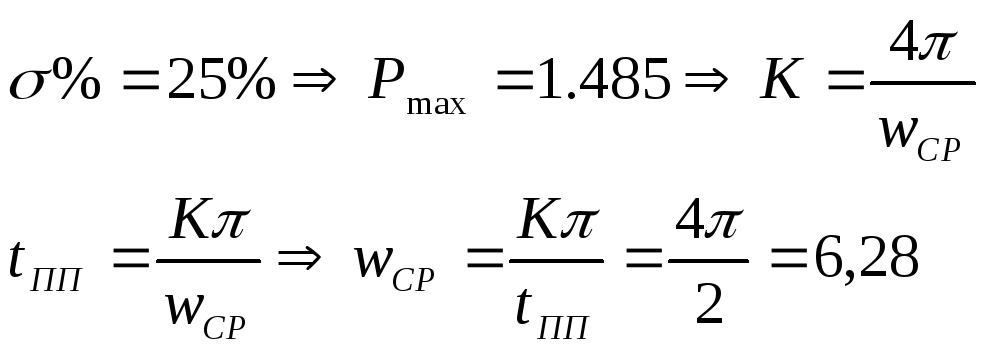
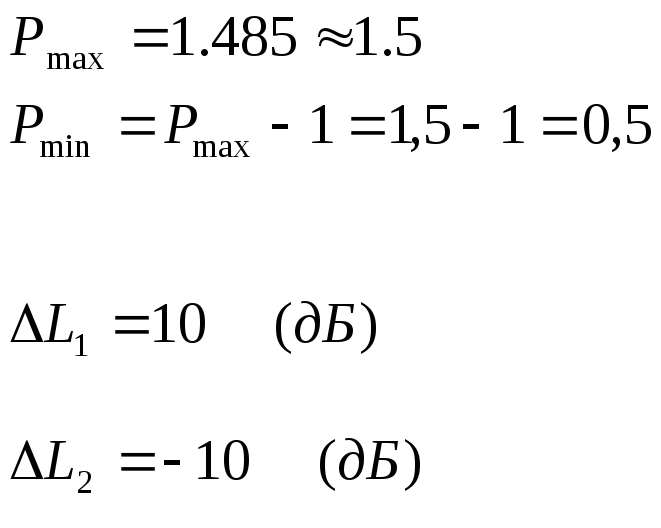
Теперь требуется найти рациональную протяженность этого участка ЛАЧХ. Для этого найдем на номограмме (приложение 3) кривую с индексом 1.5 Впишем эту кривую в соответствующий прямоугольник. (В нижней части это будет кривая с индексом 1,5 - 1,0 = 0,5.)
Крайние значения участка ЛАЧХ с наклоном -20 дБ/дек. составляют: L1 =10 дБ и L2 =-10 дБ (Это крайние значения L1 и L2). При этом гарантируется запас устойчивости по фазе Δφ°=210°-150°=60°.
-
Определим наклон ЛАЧХ регулятора:


-
По ЛАЧХ определим передаточную функцию регулятора:



График переходного процесса с регулятором представлен в рис приложение 2
Показатели
качества:
![]() ;
tпп=0,6с
;
tпп=0,6с
-
Синтез непрерывной системы с модальным регулятором.
Схема переменных состояний:






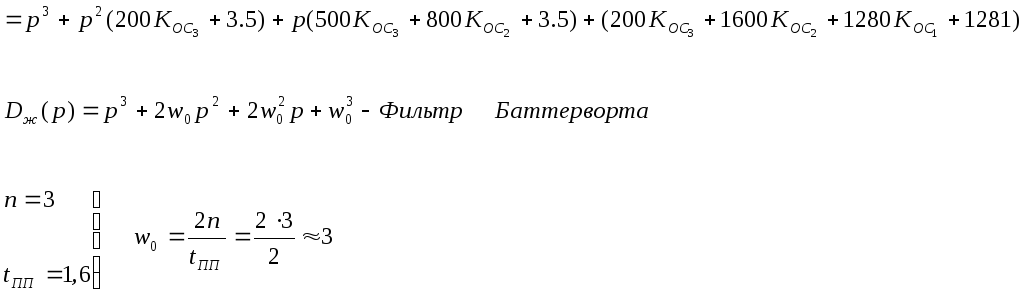

схема с модальным регулятором.

График переходного процесса с модальным регулятором приложение 3
Показатели
качества:
![]() ;
tпп=1,95с
;
tпп=1,95с
-
Расчет цифрового регулятора.
Расчет
приведенной
дискретной
передаточной
функции
разомкнутой системы
![]() подстановкой
Тастина:
подстановкой
Тастина:
![]()
![]()
![]()

![]()
Расчет передаточной функции регулятора для оптимального быстродействия:
![]() ,
,
где
![]()
![]()
График переходного процесса с цифровым регулятором приложение 4
Показатели
качества:
![]() ;
tпп=
0,8с
;
tпп=
0,8с
-
Дополнительные исследования цифровой системы.
Так
как определение дискретной передаточной
функции импульсной системы методом
подстановки Тастина
является
приближенным
способом. Введём поправку в коэффициент
 на
на
 .
И
получим лучшие характеристики
переходного процесса с цифровым
регулятором.
.
И
получим лучшие характеристики
переходного процесса с цифровым
регулятором.
![]()
![]()
![]()
График переходного процесса с цифровым регулятором приложение 5
Показатели
качества:
![]() ;
tпп=
0,58с
;
tпп=
0,58с
Приложение 1
График переходного процесса, исходной непрерывной системы (объекта).

Приложение 2
График переходного процесса с регулятором

Приложение 3
График переходного процесса с модальным регулятором

Приложение 4
График переходного процесса с цифровым регулятором

Приложение 5
График переходного процесса с цифровым регулятором
