

Министерство образования Российской Федерации
Уфимский Государственный
Авиационный Технический университет
Кумертауский филиал
Кафедра «промышленная автоматика»

Курсовая работа
по теории автоматического управления
Тема: «Система автоматического управления манипулятором»
Вариант: 14
Выполнил: студент гр. АТПП-31
А.А. Балакирев
Проверил: ст. преподаватель
Е.А. Закурдаева
Кумертау 2007
 Содержание
Содержание
Введение
Исходная схема заданной САУ
Функциональная схема САУ
Расчет общей передаточной функции разомкнутой САУ
Определение устойчивости заданной САУ.
Определение передаточной функции замкнутой системы
Построение графика ВЧХ
Построение вещественных трапеций и графиков h-функций
Анализ САУ
Вывод
Использованная литература
Введение
Для автоматизации операций
загрузки и выгрузки деталей из рабочей
зоны применяют автооператоры, которые
могут работ ать
как в автоматическом режиме, та и в
режиме ручного управления. При этом
рабочий орган манипулятора должен с
большой точностью повторять движения
рычага управления.
ать
как в автоматическом режиме, та и в
режиме ручного управления. При этом
рабочий орган манипулятора должен с
большой точностью повторять движения
рычага управления.
Исход
 ная
схема заданной САУ
ная
схема заданной САУ
М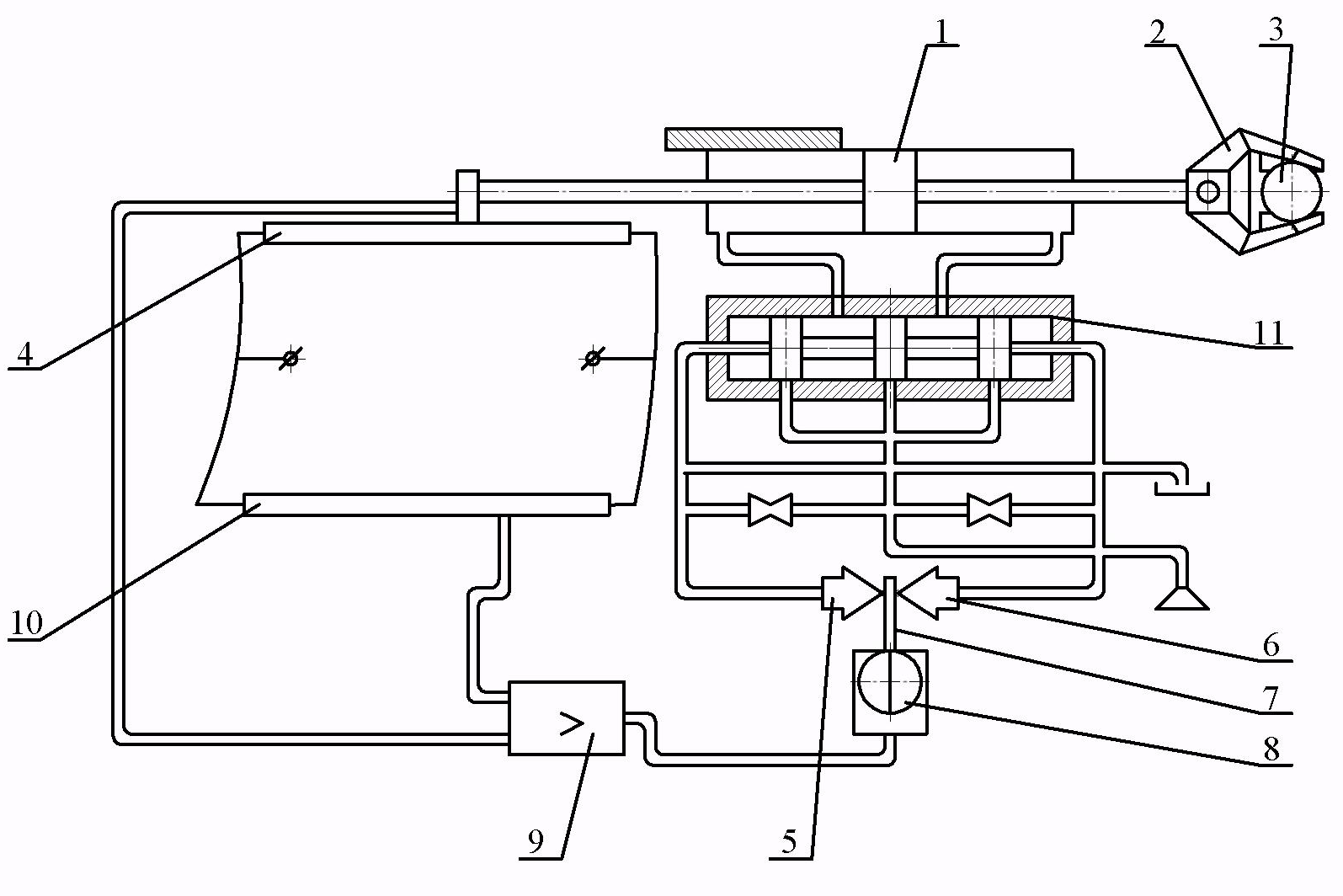 анипулятор
состоит из силового цилиндра 1 с
устройством 2 захвата детали 3 и связан
с преобразователем перемещения 4, в
качестве которого использован
потенциометр. Для управления перемещения
гидроцилиндра 1 служит двухкаскадный
гидравлический усилитель. Первый каскад
усиления содержит два сопла 5 и 6 с
заслонкой 7 и два дросселя с постоянными
проходными сечениями, включенные по
дифференциальной схеме. Заслонка 7
поворачивается на определенный угол
электромеханическим преобразователем
8, управляемым усилителем 9, входным
сигналом которого является разность
потенциалов на движках потенциометра
4 и задающего потенциометра 10, включенных
в мостовую схему. Второй каскад усиления
выполнен в виде усилителя с четырехкромочным
золотником, плунжер 11 которого расположен
в гильзе и находится под действием
пружин в нейтральном положении.
анипулятор
состоит из силового цилиндра 1 с
устройством 2 захвата детали 3 и связан
с преобразователем перемещения 4, в
качестве которого использован
потенциометр. Для управления перемещения
гидроцилиндра 1 служит двухкаскадный
гидравлический усилитель. Первый каскад
усиления содержит два сопла 5 и 6 с
заслонкой 7 и два дросселя с постоянными
проходными сечениями, включенные по
дифференциальной схеме. Заслонка 7
поворачивается на определенный угол
электромеханическим преобразователем
8, управляемым усилителем 9, входным
сигналом которого является разность
потенциалов на движках потенциометра
4 и задающего потенциометра 10, включенных
в мостовую схему. Второй каскад усиления
выполнен в виде усилителя с четырехкромочным
золотником, плунжер 11 которого расположен
в гильзе и находится под действием
пружин в нейтральном положении.
В исходном состоянии САУ заслонка 7 расположена так, что зазоры между ней и соплами 5 и 6 одинаковы, а давление в камерах А и В золотника равны друг другу. Плунжер 11 также находится в рабочем положении и рабочий цилиндр 1 неподвижен.
При смещении движка задающего потенциометра 10 на входе усилителя 9 возникает электрический сигнал. Заслонка 7 поворачивается электромеханическим преобразователем 8 и давление в камерах А и Б золотника изменяется, что влечет за собой перемещение плунжера 11 и открытие щелей золотника. Силовой цилиндр 1 приходит в движение в соответствии с разностью давлений в его полостях и перемещает движок потенциометра 4 до тех пор, пока не восстановится равновесие, т.е. пока разность потенциалов с движков потенциометра 4 и 10 не станет соизмеримой с ошибкой САУ. В этом случае сигнал на выходе усилителя 9 близок к нулю, заслонка 7, а следовательно и плунжер 11 золотника занимают нейтральное положение и движение цилиндра 1 прекращается. Таким образом, силовой цилиндр 1 с деталью 3 отслеживает перемещение движка задающего потенциометра 10.
Коэффициенты звеньев:
КП1=4 В/мм; КП2=4 В/мм; ТЭУ=0,01 с; КЭУ=220; ТЭМ=0,12 с; КЭМ=3,6 мм/В;
ω=220 с-1; ε=0,7; КГУ=4*106 мм2/с; КГЦ=8*10-5 1/мм2;