

10. Построение переходной функции системы
Качество переходных процессов в САР можно оценить по переходной функции h(t), представляющей собой реакцию системы на единичный скачок, приложенный к входу при нулевых начальных условиях.
При построении переходной функции методом трапецеидальных характеристик необходима вещественная частотная характеристика (ВЧХ) замкнутой системы Р(w). Для построения ВЧХ P(w) по логарифмическим характеристикам Lс(w) и jс(w) можно воспользоваться номограммой [3. с. 200, рис.5.24], однако для повышения точности лучше выполнить расчет ординат ВЧХ по формуле
![]()
где
![]() .
.
Результаты расчета заносим в таблицу 4.
Таблица 4
ВЧХ скорректированной САР
|
|
0,125 |
0,25 |
0,5 |
1 |
2 |
4 |
8 |
16 |
32 |
64 |
|
|
-41,982 |
-69,834 |
-93,409 |
-103,87 |
-110,44 |
-124,06 |
-153,84 |
-200,4 |
-258,43 |
-304,3 |
|
|
29,62 |
29,62 |
18,25 |
9 |
3 |
-3 |
-9 |
-15 |
-31,5 |
|
|
|
0,976 |
0,988 |
0,992 |
0,957 |
0,748 |
0,148 |
-0,394 |
-0,193 |
-0,004 |
|
Имея вещественную частотную характеристику P(), можно приближенно построить переходную функцию h(t), показывающую зависимость изменения во времени выходной величины системы в результате приложения к ее входу единичного скачка при нулевых начальных условиях. Для этого воспользуемся методом трапеций.
Проаппроксимируем график ВЧХ кусочно-ломаной линией и разобьем его на типовые трапецеидальные вещественные частотные характеристики (см. рис.7), характеризующиеся тремя параметрами: высотой Р0 = P(0), большим основанием w0, c-1, и коэффициентом наклона c, равным отношению меньшего основания к большему: c = wd /w0.
Получим две трапеции.
![]()
![]()
![]()
![]()
![]()
![]()
По
таблице h
– функций, дающей зависимость нормированной
ординаты переходной функции
![]() от
нормированного времени
от
нормированного времени![]() для
трапеции с высотойР0
= 1, основанием
w0=1,
c-1
и различными коэффициентами наклона 0
£
c
£
1 [3. с. 152‑153,
табл. 4.2.] определяем
для
трапеции с высотойР0
= 1, основанием
w0=1,
c-1
и различными коэффициентами наклона 0
£
c
£
1 [3. с. 152‑153,
табл. 4.2.] определяем
![]() и
и
![]() при следующих коэффициентах χ:
при следующих коэффициентах χ:
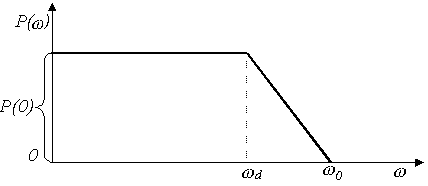
Рис.7. Трапецеидальная вещественная частотная характеристика.
Для перехода к реальной переходной функции нормированные ординаты умножаем на высоту трапеции Р0, а нормированное время делим на w0:
H =
![]() ×P0,
×P0,![]()
Все расчеты сводим в таблицы 5 и 6 соответственно для трапеций abnm и odcn.
Таблица 5
|
№ п/п |
|
t |
|
H |
|
1 |
0,5 |
0,085 |
0,199 |
0,271 |
|
2 |
1 |
0,169 |
0,386 |
0,525 |
|
3 |
1,5 |
0,254 |
0,560 |
0,762 |
|
4 |
2 |
0,339 |
0,709 |
0,964 |
|
5 |
2,5 |
0,424 |
0,833 |
1,133 |
|
6 |
3 |
0,508 |
0,928 |
1,262 |
|
7 |
3,5 |
0,593 |
0,994 |
1,352 |
|
8 |
4 |
0,678 |
1,039 |
1,413 |
|
9 |
4,5 |
0,763 |
1,057 |
1,437 |
|
10 |
5 |
0,847 |
1,067 |
1,451 |
|
11 |
8 |
1,356 |
1,024 |
1,393 |
|
12 |
10 |
1,695 |
1,027 |
1,397 |
|
13 |
13,5 |
2,288 |
1,000 |
1,360 |
|
14 |
15 |
2,542 |
0,995 |
1,353 |
|
15 |
17 |
2,881 |
0,996 |
1,355 |
|
16 |
20 |
3,990 |
0,991 |
1,348 |
|
17 |
21 |
3,559 |
0,991 |
1,348 |
|
18 |
22,5 |
3,814 |
0,995 |
1,353 |
|
19 |
24,5 |
4,153 |
0,999 |
1,359 |
|
20 |
26 |
4,407 |
0,999 |
1,359 |
Таблица 6
|
№ п/п |
|
t |
|
H |
|
1 |
0,5 |
0,016 |
0,215 |
-0,084 |
|
2 |
1 |
0,031 |
0,417 |
-0,163 |
|
3 |
1,5 |
0,047 |
0,603 |
-0,235 |
|
4 |
2 |
0,063 |
0,761 |
-0,297 |
|
5 |
2,5 |
0,079 |
0,891 |
-0,347 |
|
6 |
3 |
0,094 |
0,986 |
-0,385 |
|
7 |
3,5 |
0,109 |
1,050 |
-0,410 |
|
8 |
4 |
0,125 |
1,090 |
-0,425 |
|
9 |
4,5 |
0,141 |
1,104 |
-0,431 |
|
10 |
5 |
0,156 |
1,102 |
-0,430 |
|
11 |
7,5 |
0,234 |
1,020 |
-0,398 |
|
12 |
11 |
0,344 |
1,002 |
-0,391 |
|
13 |
12,5 |
0,391 |
0,990 |
-0,386 |
|
14 |
14,5 |
0,453 |
0,984 |
-0,384 |
|
15 |
18 |
0,563 |
1,000 |
-0,390 |
|
16 |
20 |
0,625 |
1,001 |
-0,391 |
|
17 |
21 |
0,656 |
1,001 |
-0,391 |
|
18 |
22,5 |
0,703 |
1,006 |
-0,392 |
|
19 |
25 |
0,781 |
1,004 |
-0,392 |
|
20 |
26 |
0,813 |
1,001 |
-0,391 |
Строим
зависимости Hi(t)
графически и суммированием их ординат
для ряда значений t
находим результирующую переходную
функцию
![]()
11. Оценка показателей качества процесса перерегулирования
по переходной функции
Из полученного
графика переходной функции h(t)
определим прямые показатели качества:
перерегулирование
![]()
![]() и время регулированияТрег,
где hmax,
hуст
– максимальное и установившееся значения
переходной функции, соответственно:
и время регулированияТрег,
где hmax,
hуст
– максимальное и установившееся значения
переходной функции, соответственно:
![]() ,
что меньше заданного значения – 30%
(требование выполнено).
,
что меньше заданного значения – 30%
(требование выполнено).
Трег = 1,24 c, что меньше заданного значения – 3,0 с. (требование выполнено).
Таким образом, синтезированная скорректированная САУ полностью отвечает предъявляемым к ней требованиям и по устойчивости, и по качеству процесса регулирования.
Литература
Сборник задач по теории автоматического регулирования и управления / Под ред. В. А. Бесекерского. – 5-е изд., перераб. – М.: Наука, 1978. – 512с.
Лукас В. А. Теория автоматического управления: Учеб. для вузов – 2-е изд., перераб. и доп. ‑ М.: Недра, 1990. ‑ 416с.
Макаров И. М., Менский Б. М. Линейные автоматические системы. Элементы теории, методы расчета и справочный материал: Учеб. пособ. для вузов. ‑ М.: Машиностроение, 1977. ‑ 464с.
Попов Е. П. Теория линейных систем автоматического регулирования и управления: Учеб. пособ. Для втузов. ‑ 2-е изд., перераб. и доп. ‑ М.: Наука, 1989. ‑ 304с.
5. Сташинов Ю. П. Курсовое проектирование по теории автоматического управления:Учебно-методическое пособие/ Шахтинский ин-т (филиал) ЮРГТУ (НПИ). Новочеркасск: ЮРГТУ (НПИ), 2001, 28 с.