

4. Исследование динамических свойств сау постоянного тока
4.1. Передаточная функция сау
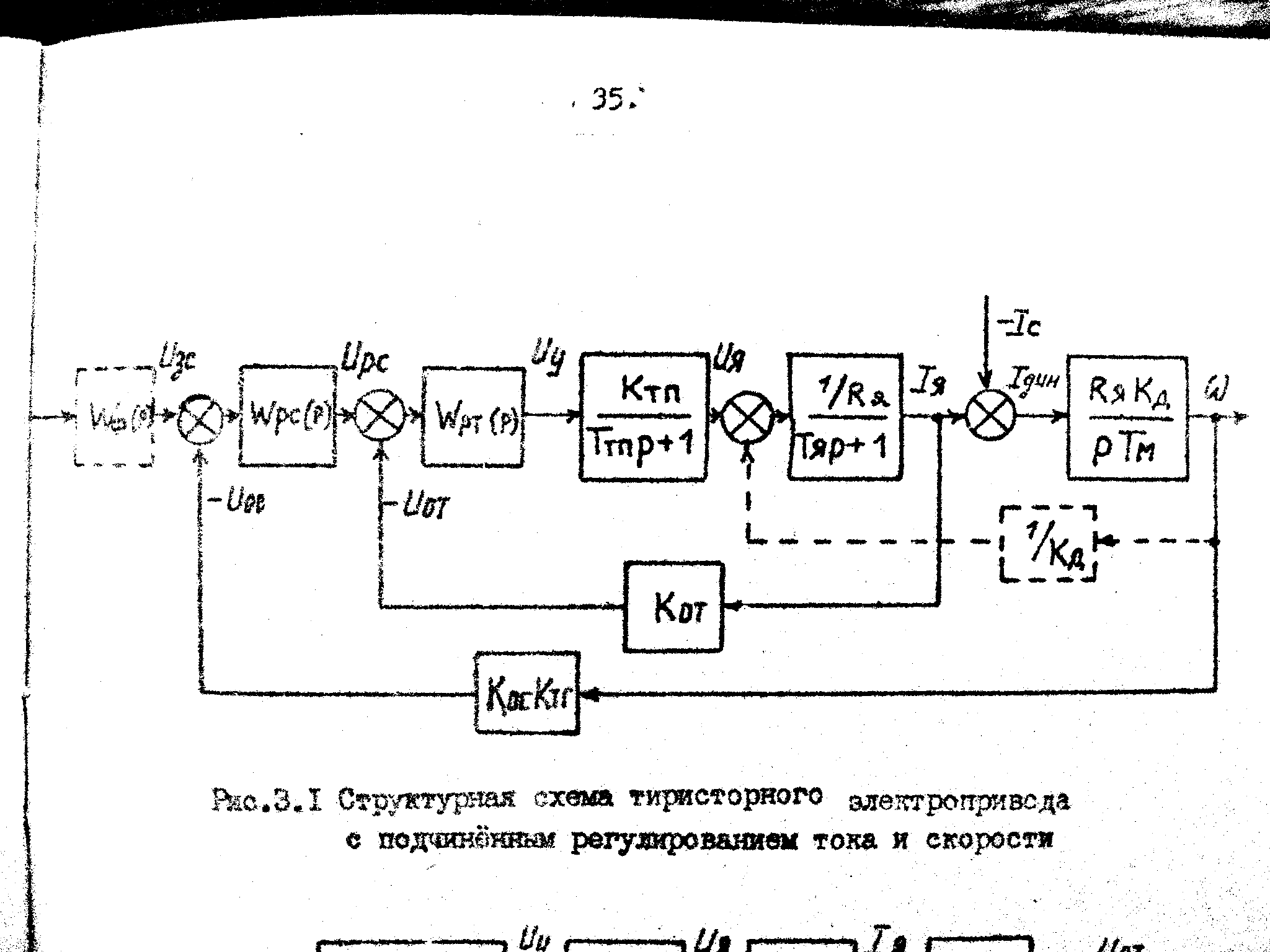
рис. 10 Структурная схема тиристорного электропривода с подчиненным регулированием тока и скорости.
Исходные дифференциальные уравнения динамики:
ω=Iдин*(Rя*Кд/р*Тм) – для якорной цепи двигателя
Iдин=Iя-Ic – для тока
Iя=[(Uя-Uд*(1/Кд))*(1/Rя)]/Тя*р+1
Uя=Uрт*(Ктп/Ттп*р+1) – для тиристорного преобразователя
Uрт=(Uрс-Uот*Кот)*Wрт – для регулятора тока
Uрс=(Uзс-Uос*Кос*Ктг)*Wрс – для регулятора скорости
Uзс=Uз*Wф – для задающего сигнала
Передаточная функция САУ:


4.2. Построение лачх и фчх.
Уравнения для реальной ЛАЧХ

Уравнения для желаемой ЛАЧХ

Уравнения для реально ФЧХ
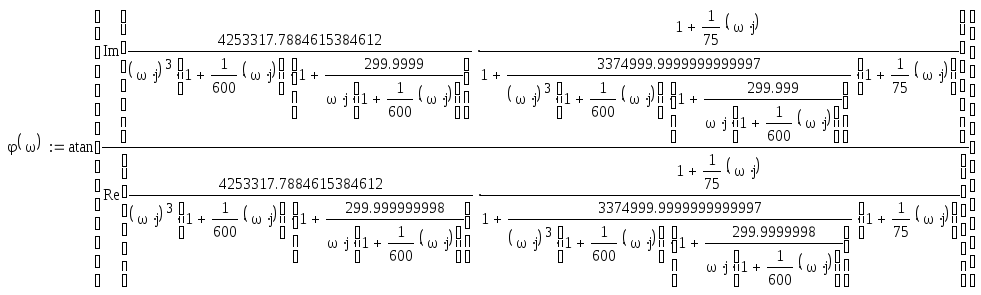
Уравнения желаемой ФЧХ


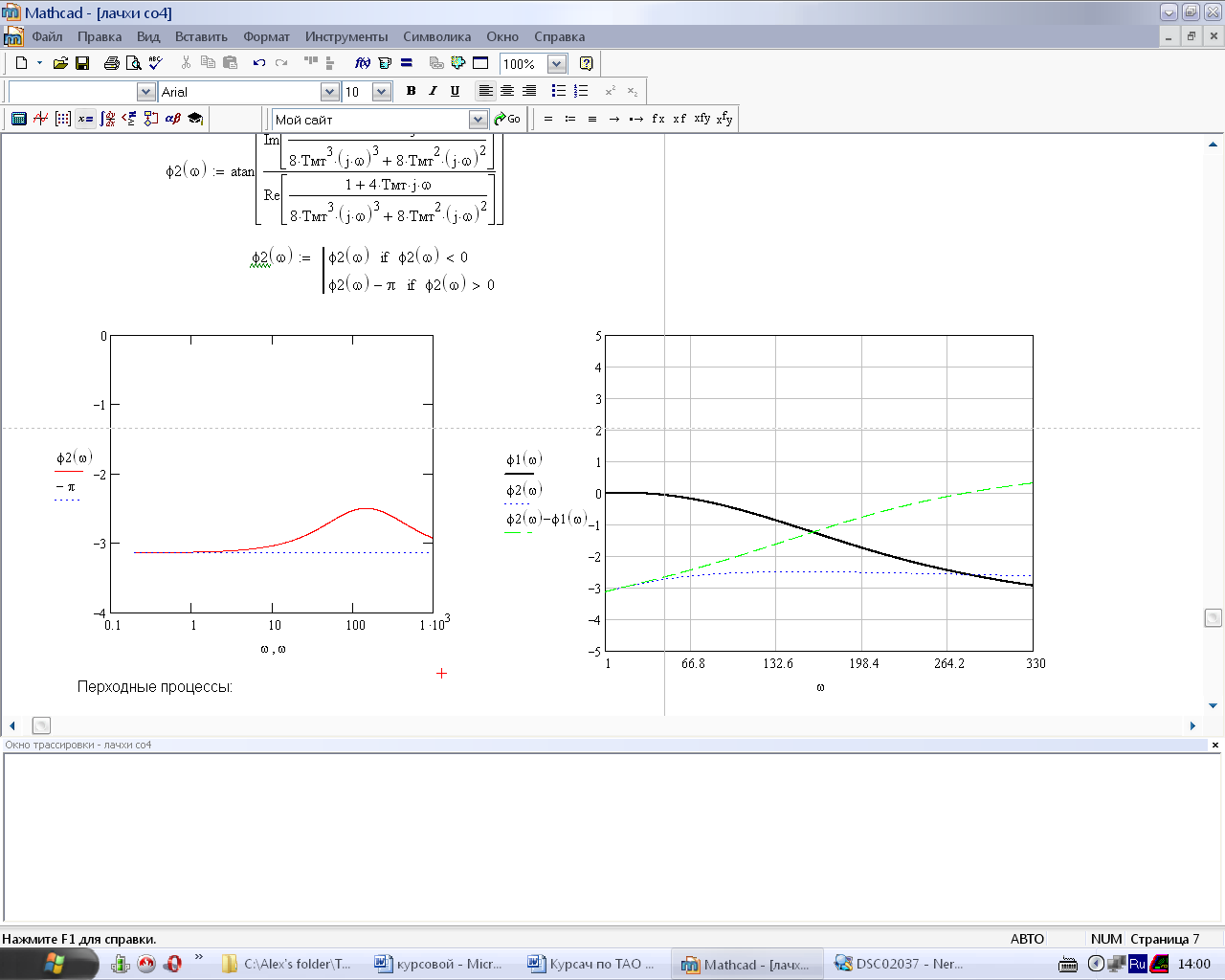
Запас по фазе
Δφ=65![]()
По виду полученной скорректированной ЛАЧХ делаем вывод что для коррекции необходим ПИ-регулятор.
4.3. Исследование устойчивости сау