

Структурная схема сау.
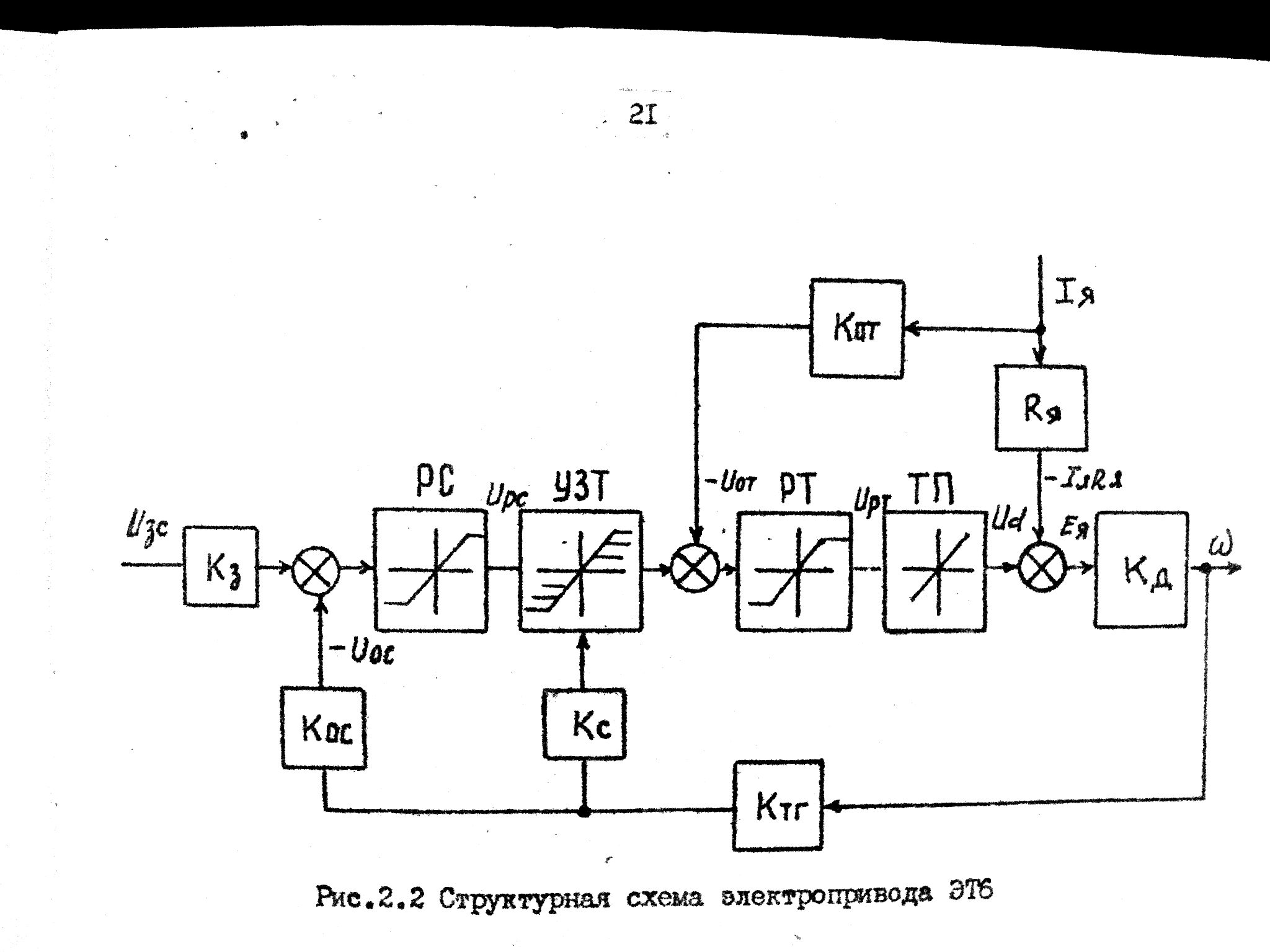
рис. 7 Структурная схема электропривода постоянного тока.
Привод содержит такие элементы как УЗТ – устройство зависимого токоограничения, РС – регулятор скорости, РТ – регулятор тока, ТП – тиристорный преобразователь.
3.Исследование статических характеристик сау постоянного тока.
3.1. Дпт как элемент сау.
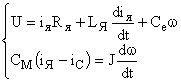
Двигатель постоянного тока, как элемент САУ, описывается дифференциальными уравнениями (1) якорной цепи и механической части двигателя:
где
![]() –
соответственно индуктивность и активное
сопротивление якорной цепи;
–
соответственно индуктивность и активное
сопротивление якорной цепи;
![]() —соответственно
ток якорной цепи и ток нагрузки;
—соответственно
ток якорной цепи и ток нагрузки;
![]() –конструктивные
постоянные двигателя;
–конструктивные
постоянные двигателя;
![]() –момент инерции
двигателя.
–момент инерции
двигателя.
При изменении
напряжения на входе двигателя на
некоторую величину
![]() изменяются
ток двигателя
изменяются
ток двигателя![]() и
частота вращения двигателя
и
частота вращения двигателя![]() и,
пренебрегая обратной связью по противоЭДС
двигателя
и,
пренебрегая обратной связью по противоЭДС
двигателя![]() ,
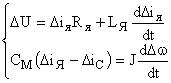
получаем уравнения (2) якорной цепи и
механической части двигателя в
приращениях:
,
получаем уравнения (2) якорной цепи и
механической части двигателя в
приращениях:
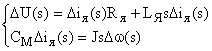
Преобразовывая
уравнения (2) и, считая
![]() ,
переходим к операторной форме записи
данных уравнений (3):
,
переходим к операторной форме записи
данных уравнений (3):
Из уравнений (3) получаем выражения для передаточных функций якорной цепи и механической части двигателя:

где Тэ – электромагнитная постоянная двигателя,
Тм – электромеханическая постоянная двигателя.
Согласно этой системе получаем, что развернутая структурная схема двигателя принимает вид, показанный на рис.1.
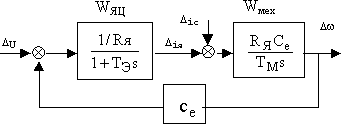
Рис. 8. Развернутая структурная схема двигателя
Свертывая развернутую схему, двигатель можно представить одним колебательным звеном (рис. 2):
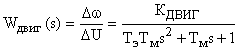
где
![]() .
.
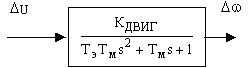
Рис. 9. Свернутая структурная схема двигателя
3.2. Статические характеристики электропривода.
Расчет статических характеристик привода проведем в I-ом квадранте в диапазоне скоростей ω=0÷ω при всех допустимых перегрузках по току.
Исходные параметры:
Мн=21 Нм
nн=750 об/мин
ω![]() =78,54
рад/с
=78,54
рад/с
Рн=1100 Вт
Uян=50 В
Iян=28 А
nмах=2000 об/мин
ω![]() =209,44
рад/с
=209,44
рад/с
Тм=8,6*10![]() с
с
Тя=7,65*10![]() с
с
Вводим постоянные данные для расчета на всех участках характеристики:
к![]() =5000
– коэффициент усиления РТ
=5000
– коэффициент усиления РТ
к![]() =1
– коэффициент передачи потенциометрического
задатчика
=1
– коэффициент передачи потенциометрического
задатчика
Е![]() =15
В– ЭДС источника задающего сигнала
=15
В– ЭДС источника задающего сигнала
R![]() =500
Ом – внутреннее сопротивление задающего
источника
=500
Ом – внутреннее сопротивление задающего
источника
к![]() =0,08
В/А – коэффициент передачи датчика тока
=0,08
В/А – коэффициент передачи датчика тока
к![]() =0,3
Вс/рад – коэффициент передачи
тахогенератора
=0,3
Вс/рад – коэффициент передачи
тахогенератора
![]()
к![]() =0,008
В/А – коэффициент передачи обратной
связи по току
=0,008
В/А – коэффициент передачи обратной
связи по току
ΔU![]() =1,5
В – падение напряжения на диоде
=1,5
В – падение напряжения на диоде
R![]() =300
(100-500) – суммарное сопротивление цепи
=300
(100-500) – суммарное сопротивление цепи
Е![]() =15
=15
R![]() =500
Ом – внутреннее сопротивление
тахогенератора
=500
Ом – внутреннее сопротивление
тахогенератора
R![]() =R
=R![]() =10000
Ом – сопротивление резисторов на входе
РС
=10000
Ом – сопротивление резисторов на входе
РС
R![]() =20000
Ом – полное сопротивление потенциометров
в цепях задания и тахогенератора
=20000
Ом – полное сопротивление потенциометров
в цепях задания и тахогенератора
R![]() =13052
Ом – регулируемое сопротивление
потенциометра в цепи тахогенератора
=13052
Ом – регулируемое сопротивление
потенциометра в цепи тахогенератора
m=6 число пульсаций на периоде сети
Расчет коэффициентов:

к![]() =0,42
=0,42
Рпотерь=220 Вт
Q=110 Вт

Rя=0,14 Ом
Кд=1,7 – коэффициент передачи электродвигателя постоянного тока
Δωр%=17 %
Кsum=566,86
Крс=21.22 – коэффициент усиления регулятора скорости
![]()
Ud0=297

Uун=2,53

Ктп=19,8 – коэффициент тиристорного преобразователя
Расчет на участке АВ допустимых нагрузок:
Записываем полную систему уравнений статики:
ω=(Uя-IяRя)Кд – для двигателя;
Uя=UртКтп-IяRвн – для преобразователя;
Uрт=(Uрс-IяКдт)Крт – для регулятора РТ;
Uрс=(ЕзКз-ωКтгКос)Крс – для регулятора РС.
Путем последовательной подстановки получаем уравнение

ω=ω![]() -
Δω
-
Δω
Δω=IяКд(Rвн+Rя)=13,33 рад/с
ω=78,54-13,33= 65,21рад/с
Граничная точка В находится на пересечении статической характеристики и перегрузочной прямой.
Расчет на участке ВС включения УЗТ.
При правильном расчете УЗТ в точке В произойдет открывание одного из опорных диодов и управляющее напряжение на входе РТ уменьшится на величину падения напряжения на суммарном сопротивлении контура управляющего тока Iу. Тогда уравнения статики примут вид:
ω=(Uя-IяRя)Кд
Uя=UртКтп-IяRвн
Uрт=(U![]() рс-IяКдт)Крт
рс-IяКдт)Крт
U![]() рс=(ЕзКз-
ωКтгКос)Крс-IуR
рс=(ЕзКз-
ωКтгКос)Крс-IуR![]()
Iу=0,001 А
Координаты точки С определятся в предполоджении, что в этой точке в результате уменьшения сигнала обратной связи по скорости и постоянства сигнала задания регулятор РС выйдет в режим насыщения. Сигнал ошибки на входе РС
ΔUсн=0,56
Uос=6


ωнас=48,11 рад/с

Uоп=14,93
 Структура
этого уравнения очевидно будет
Структура
этого уравнения очевидно будет
ω= ω![]() -
Δω(Iя)-Δω(Iу)
-
Δω(Iя)-Δω(Iу)
Δω(Iу)=IуR![]() КртКтпКд=0,001*300*1.7*19.8=10
рад/с
КртКтпКд=0,001*300*1.7*19.8=10
рад/с
48,1=78,54- Δω(Iя)-10
Δω(Iя)= IяКд(Rвн+Rя)
Iя=20,44/(1,7*0,28)=64 А
Расчет на участке CD
Насыщение регулятора
скорости означает, что при дальнейшем
нагружении система электропривода
ведет себя как разомкнутая, т.е. статическая
характеристика становится еще мягче.
Уравнение можно получить как и ранее
из уравнений статики, полагая Ктг=0
U![]() рс=12
В. Положение точки D на оси тока определится
из полученного таким образом выражения
статики приравнивая скорости к нулю
ω=0.
рс=12
В. Положение точки D на оси тока определится
из полученного таким образом выражения
статики приравнивая скорости к нулю
ω=0.
ω=(Uя-IяRя)Кд
Uя=UртКтп-IяRвн
Uрт=(U![]() рс-IяКдт)Крт
рс-IяКдт)Крт
U![]() рс=(ЕзКз-
ωКтгКос)Крс-IуR
рс=(ЕзКз-
ωКтгКос)Крс-IуR![]()
Iя01=89,29 А
Построение статических характеристик: