

6. Расчет параметров корректирующего устройства
 По
виду передаточной функции корректирующего
устройства определим схему корректирующего
устройства.
По
виду передаточной функции корректирующего
устройства определим схему корректирующего
устройства.
![]() ;
;
![]()
![]() Выбираем
электрическую схему, передаточную
функцию типового корректирующего
устройства. Она будет содержать в себе
следующие электрические схемы:
Выбираем
электрическую схему, передаточную
функцию типового корректирующего
устройства. Она будет содержать в себе
следующие электрические схемы:
1. Передаточная функция корректирующего звена [2, 474 стр.]:
![]()
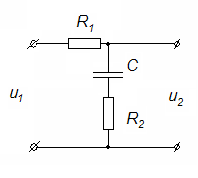 G0=1
; T2
= R2
·
C;
T1
=
G0=1
; T2
= R2
·
C;
T1
= ;
;
Рисунок 6.1 – Схема корректирующего звена
Таким образом, получили, что:
R1 = 40 Ом;
R2 = 10 кОм;
C = 0.35 Ф;
2. Передаточная функция корректирующего звена [2, 474 стр.]:
![]()
G0=
![]() G0=0,0566
T1
= R1
·
C1;
G0=0,0566
T1
= R1
·
C1; T2
=
T2
=![]() ∙
T1;
∙
T1;

Рисунок 6.2 – Схема корректирующего звена
Таким образом, получили, что:
R1 = 10 Ом;
R0 = 0,7 Ом;
C1 = 0.012 Ф;
3. Передаточная функция корректирующего звена [2, 498 стр.]:
![]()
k = 1 / R1 ∙ C;
 T
= R2
∙ C;
T
= R2
∙ C;
Рисунок 6.3 - Схема корректирующего звена
Таким образом, получили, что:
R1 = 3 Ом;
R2 = 0,072 Ом;
C = 0.33 Ф;
Реализация передаточной функции корректирующего устройства через четырёхполюсники, имеет вид:

Рисунок 6.4 – Схемотехническая реализация передаточной функции корректирующего устройства,
где: R1 = 40 Ом; R2 = 10 кОм; R3 = 10 Ом; R4 = 0.7 Ом;
R5 = 3 Ом; R6 = 0,072 Ом; C1 = 0.35 Ф; C2 = 0.012 Ф; C3 = 0.33 Ф.
 При
коррекции с помощью интегрирующих
устройств система менее подвержена
влиянию помех.
При
коррекции с помощью интегрирующих
устройств система менее подвержена
влиянию помех.
7. Вывод
В данной курсовой работе произвели анализ исходных данных и из функциональной схемы получили структурную схему САУ. Для полученной схемы с помощью пакета Siam построили график переходного процесса. Произвели анализ устойчивости некорректированной САУ и пришли к выводу, что данная система неустойчива, а, следовательно, не может поддерживать режим работы объекта регулирования при действии на него возмущающих факторов.
Эта система не соответствует всем необходимым параметрам. Поэтому мы провели синтез САУ и подобрали такое последовательное корректирующее устройство, при котором система стала отвечать необходимым параметрам. Построили для скорректированной САУ графики переходного процесса, ЛАХ и ЛФХ (рисунок 7.1 и 7.2). Произвели анализ скорректированной САУ и пришли к выводу, что данная САР устойчива и работоспособна, т. к. время перерегулирования tP = 0,25 c, величина перерегулирования
![]() = 14,9%,
число колебаний N
< 2 и wС
находится
левее wКР.
= 14,9%,
число колебаний N
< 2 и wС
находится
левее wКР.

Рисунок 7.1 – Переходный процесс системы
Время перерегулирования tp = 0,25, (с);
Коэффициент
перерегулирования
![]() ;
;


Рисунок 7.2 – ЛАХ и ЛФХ системы
Запас устойчивости по фазе: γ = 58°;
Запас устойчивости по амплитуде: h = 20.
Точность регулирования определяется ошибкой системы.
Передаточная функция ошибки:
![]()
где: g(t) – единичный входной сигнал;
С0 – коэффициент ошибки по входному воздействию;
С1 - коэффициент ошибки по скорости;
С2 - коэффициент ошибки по ускорению.
Так как система обладает астатизмом первого порядка с начальным наклоном -20 дБ/дек., то:
С0 = 0; С1 = 1/DV; С2/2=1/DE,
где: DV – добротность по скорости;
DE – добротность по ускорению.
DV
= wV;
DE
=
![]() .
.
Из графика приложения определяем wV и wE.
lg wV = 5,33; wV = 213796,2;
lg wE = 0.87; wE =7,413;
DV = 213796,2; DE = 54,95;
 C1
= 1/ DV
= 0,0000047;
C1
= 1/ DV
= 0,0000047;
C2/2 = 1/ DE = 0,018.
![]()
E(t)=0.