

Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Тульский государственный университет
Кафедра «Робототехники и автоматизации производства»
Курсовая работа
по дисциплине
«Теория автоматического управления»
Вариант 1114.
Выполнил: Кулаков А.В.
гр. 120651
Проверил: к.т.н., доц., Хапкина И.К.
Тула 2008
Оглавление
Задание. 3
Введение. 4
Описание элементного состава и принципа работы привода робота 5
Анализ сервопривода как объекта управления проектируемого следящего привода. 11
Определяем структуру и параметры регулятора непрерывного следящего привода. 17
Найдём дискретную передаточную функцию корректирующего устройства 24
Оценим момент трогания спроектированной системы, а также точность и быстродействие при действии возмущений и нелинейных факторов 28
Список литературы 29
Задание.
Привести описание элементного состава и принципа работы привода робота, соответствующего Вашему варианту задания.
Провести анализ сервопривода как объекта управления проектируемого следящего привода.
Определить структуру и параметры регулятора непрерывного следящего привода робота с заданными элементами усилительно- преобразовательной и силовой части привода по требованиям к его быстродействию и точности.
Оценить момент трогания спроектированной системы, а также точность и быстродействие при действии возмущений и нелинейных факторов.
Разработать алгоритм работы дискретного корректирующего устройства для микропроцессорной реализации регулятора следящего электропривода.
Введение.
Целью выполнения курсовой работы по дисциплине «Теория автоматического управления» является закрепление на практике принципов и методов проектирования линейных и нелинейных систем управления, а также методик исследования и проектирования систем регулирования и робототехники.
В процессе выполнения курсовой работы закрепляются теоретические положения, практические умения и навыки по теории управления в процессе решения задачи синтеза конкретной замкнутой системы автоматического управления – привода робототехнической системы. Исходными данными к работе являются математическая модель объекта управления, ее параметры, требования статической и динамической точности и помехозащищенности. Результаты синтеза проверяются моделированием спроектированной системы.
Описание элементного состава и принципа работы привода робота
В соответствии с вариантом задания (1114) из таблицы вариантов задания получим следующие данные:
|
Код |
Сокращенное Обозначение |
t p, C |
p,
|
, % |
, %
|
As2 |
s,
|
|
1114 |
УМ1-ЭМП1-ГДДУ-КН3 |
0,02 |
5 |
6 |
5 |
0,1 |
100 |


Запишем математические модели для каждого элемента в соответствии с его порядковым номером и сокращенным обозначением:
Безынерционный усилитель – УМ1 – 1000
Uy(t)=Ky*Uкф (1.1)
Ky=1…5;
2) Электромеханический преобразователЭМП1 - _100
 (1.2)
(1.2)
Кэ=0.2…1; Тэ=2*10^-3
Гидроцилиндр – золотниковый распределитель
ГДДУ __10

q=К3*x;
E=q-z;
 ;
;
 ; (1.3)
; (1.3)
K3=10; Ku=3…6; T=0.02…0.04 c.
=0.3…0.5; K4=0.1; Kм=0.2..0.6;
Mc=8*10-1;
3). Передаточный механизмов от двигателя к нагрузке (редуктор)
H3 - ___3;
 ;Tp=1*10^-3; (1.4)
;Tp=1*10^-3; (1.4)
j=100…200;
Гидравлическим распределителем называется гидроаппарат, предназначенный для управления пуском, остановкой и направлением потока жидкости в двух или более гидролиниях в зависимости от наличия внешнего управляющего воздействия. Управление потоком жидкости осуществляется с целью обеспечения включения, реверса и остановки гидродвигателей. Основными конструктивными элементами гидрораспределителей являются корпус и запорно-регулирующий элемент.
Гидрораспределители подразделяются по следующим признакам:
· по конструкции запорно-регулирующего элемента – золотниковые, крановые, клапанные;
· по числу внешних гидролиний, поток в которых управляется распределителем, – двух, трех-, четырехлинейные и т. д.;
· по числу фиксированных или характерных позиций запорно-регулирующего элемента – двух-, трехпозиционные и т. п.;
· по виду управления – распределители с ручным, механическим, электрическим, гидравлическим, пневматическим и комбинированным электрогидравлическим, пневмогидравлическим и управлением;
· по способу открытия рабочего проходного сечения – направляющие и дросселирующие.
Рисунок 1. Условное обозначение распределителей на схемах
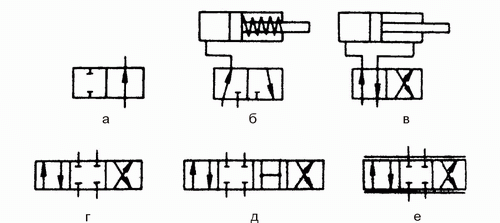
а – двухлинейный двухпозиционный; б – трехлинейный двухпозиционный; в – четырехлинейный двухпозиционный; г – четырехлинейный трехпозиционный; д – четырехлинейный четырехпозиционный; е – дросселирующий четырехлинейный трехпозиционный
Широко применяются в гидроприводах гидрораспределители золотникового типа. Они обладают следующими достоинствами:
· простотой осуществления многопозиционности, т.е. способностью обеспечить все необходимые действия выходного звена гидвигателя одним золотником;
· легкостью управления, что важно в системах с ручным управлением;
· высокой герметичностью;
· компактностью и сравнительной простотой конструкции;
· разгруженностью золотника от статических сил, создаваемых давлением рабочей жидкости.
Недостатки золотниковых распределителей:
· высокие требования к чистоте рабочей жидкости;
· сложность изготовления и ремонта;
· возможность заклинивания;
· возможность облитерации (заращивания) щелей золотников,
· необходимость квалифицированного обслуживания.
На рис. 2 показана конструктивная схема распределителя золотникового типа. В корпус 1 распределителя вставлен цилиндрический золотник 2. Золотник имеет три цилиндрических пояска с острыми кромками, а в корпусе выполнены пять цилиндрических расточек. При положении золотника в исходной позиции (а) напорная, сливная и исполнительные гидролинии перекрыты. При перемещении золотника из исходной позиции вправо (б) напорная гидролиния соединяется с поршневой полостью А гидроцилиндра и его поршень перемещается вправо. При этом рабочая жидкость из штоковой полости Б вытесняется в сливную гидролинию. При перемещении золотника из исходной позиции влево рабочая жидкость из напорной гидролинии поступает в полость Б, а из полости А вытесняется в сливную гидролинию. Условное обозначение распределителя (см. рис. 2) представлено на рис. 1, г.
Рисунок 2. Схема золотникового распределения
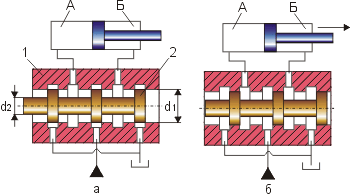
Перемещение золотника в корпусе возможно лишь при наличии радиального зазора 4... 10 мкм.
По перекрытию рабочих окон золотником (рис. 3) различают гидрораспределители с нулевым (ширина цилиндрического пояска золотника l равна ширине цилиндрической расточки корпуса распределителя t), положительным (l>t) и отрицательным (l>t) перекрытиями
Рисунок 3. Схема перекрытия рабочих окон в золотниковых распределениях
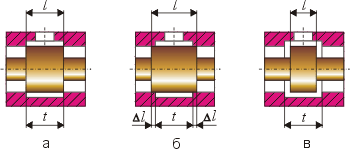
а – наружного; б – положительного; в – отрицательного
Для управления гидроцилиндрами распределители могут иметь различные схемы соединения каналов: параллельную, последовательную и индивидуальную.
Гидрораспределитель состоит (рис 4) из корпуса 6, верхней и нижней крышек, трех золотников 8, перепускного 10 и предохранительного 12 гидроклапанов. В корпусе гидрораспределителя предусмотрены главный подводящий канал 11 (рис. 4), соединяемый с напорной гидролинией от насоса, отводные каналы 5 и 7, выходящие попарно от каждого из золотников и предназначенные для соединения с полостями гидроцилиндров, а также сливной канал 2, находящийся напротив гидроклапана 10 и предназначенный для слива рабочей жидкости через сливную гидролинию в гидробак. Каждый золотник 8 может управлять одним гидроцилиндром или их парой, занимая одно из четырех положений: среднее положение - "нейтральное", вверх -"подъем", вниз – "опускание", крайнее нижнее – "плавающее".
В нейтральном положении (как показано на рисунке) золотники 8 перекрывают рабочие каналы 5 и 7 гидроцилиндров. Рабочая жидкость от насоса поступает в канал 11, создает в нем давление, большее чем в каналах А и Б, и соединенном с каналом 11 пространстве под поршнем перепускного гидроклапана 10. Каналы А и Б связаны вертикальным сверлением (на рисунке не показано) со сливной полостью 2. Благодаря перепаду давления гидроклапан 10, преодолевая сопротивление пружины, опускается, сообщая полость канала 11 со сливной полостью 2, перепуская тем самым рабочую жидкость на слив в гидробак. Гидроцилиндры при нейтральном положении золотников заперты и неподвижны. Гидрораспределители, у которых напорная гидролиния является тупиковой при нейтральном положении золотников, называют гидрораспределителями с "закрытым центром". Например, при положении на "подъем" золотник 8 своими поясками открывает доступ жидкости из канала 11 в канал 7, а канал 5 сообщается с полостью 2. Одновременно нижние пояски золотника 8 перекрывают канал А и разобщают его с каналом Б, связанным со сливной полостью 2. При этом жидкость, поступающая под давлением в канал 11, через сверление В в поршне гидроклапана 10 поступает также в пространство под гидроклапаном 10 и канал А. В результате давление в полостях над поршнем гидроклапана 10 и под ним выравнивается и гидроклапан под действием усилия пружины прижимается к седлу и разобщает канал 11 с полостью 2. При "плавающем" положении рабочая жидкость перепускается гидроклапаном 10 на слив, а каналы 5 и 7 поясками золотника сообщены с полостью 2.
Рисунок 4. Гидрораспределитель
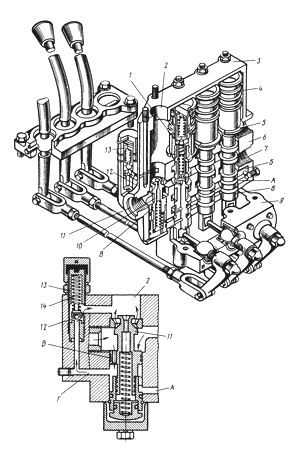
1 – шарик, 2 – полость, 3, 9 – крышки, 4, 14 – пружины, 5, 7, 11 – каналы, 6 – корпус, 8 – золотник, 10, 12 – гидроклапаны, 13 – винт
В соответствии с элементами построим модель системы.
УМ
ЭМП
Двигатель
Редуктор
Нагрузка



