

Найдём дискретную передаточную функцию корректирующего устройства
Рассчитаем частоту опроса для корректирующего устройства в дискретном исполнении.
Расчет проведём, исходя из правила, что время опроса (TO) должно быть как минимум в три раза меньше минимальной постоянной времени в непрерывной части системы.
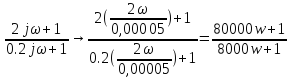
Примем TO=0,00005 с
Для нахождения передаточной функции по её непрерывному виду, проведём преобразование:
s=jω 


 , где
, где


Исходя из того, что
 .
Т.е передаточная функция есть отношение
выходного сигнала ко входному, получим:
.
Т.е передаточная функция есть отношение
выходного сигнала ко входному, получим:


Следовательно

Т.о. дискретная передаточная функция КУ в общем виде будет иметь следующий вид:
Из передаточной функции следует разностное уравнение корректирующего устройства:
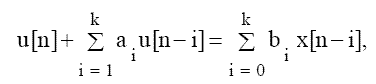
 ,
где
,
где


Алгоритм работы КУ:
x[i]
x[i-1]
y[i-1]
y[i]

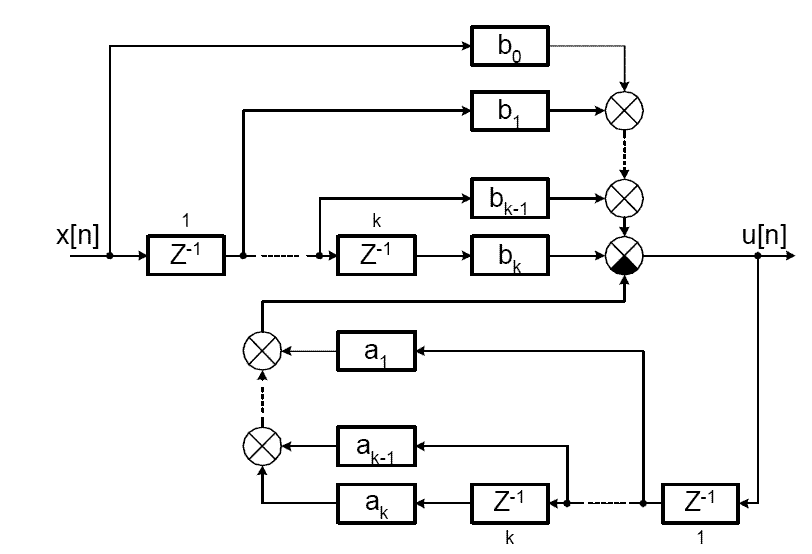
Структурная схема программной реализации решения разностного уравнения приведена ниже. Она соответствует прямому программированию. Для аппаратной реализации прямой схемы цифрового фильтра
требуется 2k линий задержки.
Оценим момент трогания спроектированной системы, а также точность и быстродействие при действии возмущений и нелинейных факторов
Проведём анализ динамических характеристик синтезированной системы в сравнении с требованиями ТЗ при действии внешних возмущений. В качестве нелинейного возмущающего воздействия используем гармонический синусоидальный сигнал.
Возмущающее воздействие, согласно заданию:
As2=0.1
ωs=100Hz
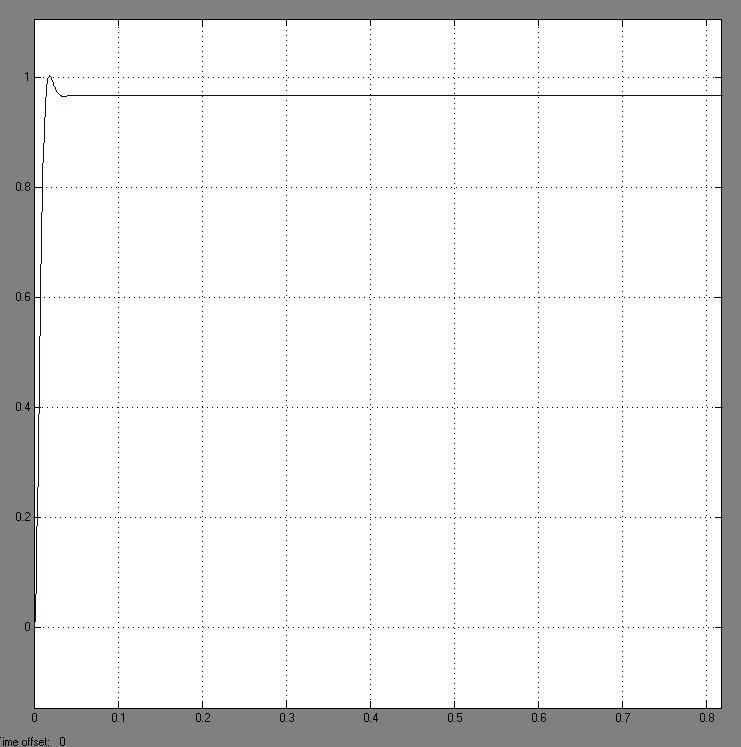

По графику оценим:
Время регулирования:
tP=0.02c.
Перерегулирование:

Статическую ошибку:

Момент трогания системы при действии возмущений составляет около 0,001 с.
Вывод: полученная система при действии внешних возмущающих воздействий заданной величины удовлетворяет требованиям Т.З.
Список литературы
Бесекерский В.А. , Попов Е.В. «Теория систем автоматического регулирования», «Наука» Москва, 1975;
Топчеев Ю.И., Цыпляков А.П. Задачник по теории автоматического регулирования. Учеб. пособ. Для вузов. – М.: машиностроение, 1977;
Микропроцессорные системы автоматического управления / В.А. Бесекерский, Н.Б. Эфимов и др. под ред. В.А. Бесекерского. – Л.: Машиностроение, 1988;
Тюкин В.Н. Теория управления, часть 2 Особые линейные и нелинейные системы, Вологда, 2000.