

Анализ сервопривода как объекта управления проектируемого следящего привода.
Сервопривод – устройство, которое может самостоятельно отслеживать своё перемещение в соответствии с управляющим воздействием и корректировать свои внутренние параметры. Усилитель, ЭМП, гидроцилиндр и редуктор представляют собой объект управления. В следящем приводе используется принцип управления с отрицательной О.С. В большинстве случаев, благодаря использованию сервоприводов достигаются наилучшие характеристики систем автоматизации, и, не редко их применение является единственно приемлемым. Современный сервопривод способен управлять скоростью, моментом и положением. Принцип его действия подразумевает возможность решения задачи стабилизации и собственно задачи слежения. Эти характеристики определяют сервоприводы как наиболее приоритетные на тех объектах, где предъявляются высокие требования к динамике и точности работы электромеханических систем. На привод действуют возмущающее воздействие в виде гармонического сигнала и постоянная составляющая, являющаяся результатом трения в двигателе и постоянной составляющей нагрузки.

f(t)

Получим передаточные функции всех элементов системы.
1). Для уравнения 1.1.
Зададимся Ку=2. Общий вид передаточной функции:
UкфUy
Uкф– входной сигнал(напряжение)
Uy– выходной сигнал(напряжение)
Уравнение 1.1 соответствует усилительному звену. Его передаточная функция имеет следующий вид:
 (2.1)
(2.1)
Для уравнения 1.2.
Uy – входной сигнал
x– выходной сигнал
 (2.2)
(2.2)
Для уравнения 1.3.
x– входной сигнал
y– выходной сигнал
Проведем замену:
 .
Получим:
.
Получим:
 (2.3)
(2.3)
Пусть
a= ,
c1=
,
c1= E-a
,a=
E-a
,a= E-
c1 ,тогда
E-
c1 ,тогда
 ,
,
z= ,
,
 =
= .
.
Получим передаточные функции для уравнений системы, содержащих дифференцирование:
 (2.4)
(2.4)
 , (2.5)
, (2.5)
 (2.6)
(2.6)
Для уравнения 1.4.
y – входной сигнал
φ – выходной сигнал
 (2.7)
(2.7)
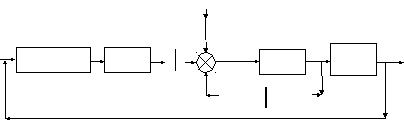
На основании полученных передаточных функций элементов системы и принятых допущениях о значениях постоянных получим разомкнутую передаточную функцию системы управления.



-


Uкф
Uy
E
х q
 y
φ
y
φ






-












Примем:
 ,
,
 ,
, ,
, ,
, ,
, ,
, ,j=100,
,j=100,
Получим:



-













-



Получим ЛАЧХ неизменяемой части.
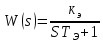
Получим эквивалентную передаточную функцию системы. Для этого воспользуемся правилами последовательного и встречно параллельного соединения.
 ,
,


ПФ содержит четыре звена.
Рассчитаем значение
 ,
гдеk– коэффициент при
числителе, определяющий точку начала
ЛАЧХ на оси ординат.
,
гдеk– коэффициент при
числителе, определяющий точку начала
ЛАЧХ на оси ординат.
k=1;
 (5.1)
(5.1)
Для построения ЛАЧХ запишем наклон и частоты сопряжения для каждого звена:
Апериодическое звено
 .Имеет наклон
.Имеет наклон

 (5.2)
(5.2)
Апериодическое звено
 ,
имеет наклон
,
имеет наклон


 2,6 (5.3)
2,6 (5.3)
Апериодическое звено
 ,
имеет наклон
,
имеет наклон

 (5.4)
(5.4)
Апериодическое звено
 ,
имеет наклон
,
имеет наклон

 (5.5)
(5.5)

Т.к. ЛАЧХ берет своё начало ниже оси абсцисс, определить частоту среза нельзя.
Определяем структуру и параметры регулятора непрерывного следящего привода.
При построении желаемой ЛАЧХ и нахождении ПКУ, будем исходить из требований к системе:
tp=0.02c,
Δ=5%,
δ=6%
ωр=5
Параметр системы по которому будем проводить расчет корректирующего устройства – φ. Для данного привода он соответствует перемещению манипулятора.
Определим частоту среза желаемой ЛАЧХ:
Из условия:


Отсюда:
 (6.2)
(6.2)
Определим области НЧ, СЧ, И ВЧ.
В СЧ области наклон асимптоты должен
составлять
 ,
для обеспечения равенства нулю статической
ошибки.
,
для обеспечения равенства нулю статической
ошибки.
Т.к область СЧ составляет
 от значения частоты среза, то соответственно
нижняя область СЧ будет составлять:
от значения частоты среза, то соответственно
нижняя область СЧ будет составлять:
 (6.3)
(6.3)
Верхняя область СЧ будет иметь значение:
 (6.4)
(6.4)
Определение коэффициента усиления корректирующего устройства.
 , откуда
, откуда (6.5)
(6.5)
Примем

Рассчитаем коэффициент усиления корректирующего устройства:
 (6.6)
(6.6)
Lp=20lgAp>20lg(
 )
, Lp>20lg(
)
, Lp>20lg( )=24,4.
)=24,4.
Кроме того
 ,
откуда при ωр=5 такжеLp=24,4.
,
откуда при ωр=5 такжеLp=24,4.
То есть при ωр=5 дляδ=6% желаемая ЛАЧХ должна находится выше 24,4dB,
На основании пунктов 1-4 построим желаемую ЛАЧХ.
Для этого введём два дополнительных звена (ПКУ).
1). Форсирующее звено:

 , Т=2. Звено поднимает располагаемую ЛАЧХ
на
, Т=2. Звено поднимает располагаемую ЛАЧХ
на . Итоговый наклон ЛАЧХ становится
. Итоговый наклон ЛАЧХ становится
2). Апериодическое звено:

 , Т=0,02. Звено опускает располагаемую
ЛАЧХ на
, Т=0,02. Звено опускает располагаемую
ЛАЧХ на .
Итоговый наклон ЛАЧХ благодаря этому
звену становится
.
Итоговый наклон ЛАЧХ благодаря этому
звену становится .
.
Таким образом на всей СЧ области наклон
желаемой ЛАЧХ составляет
 .
.
На основании пункта 5 получим передаточную функцию последовательного корректирующего устройства.
 (6.7)
(6.7)
Построим структурную схему системы с ПКУ, проведя единичную обратную связь по φ.
Переходный процесс в данной системе представлен на рисунке 5.
По графику оценим время регулирования:
Рисунок 5. Переходный процесс.
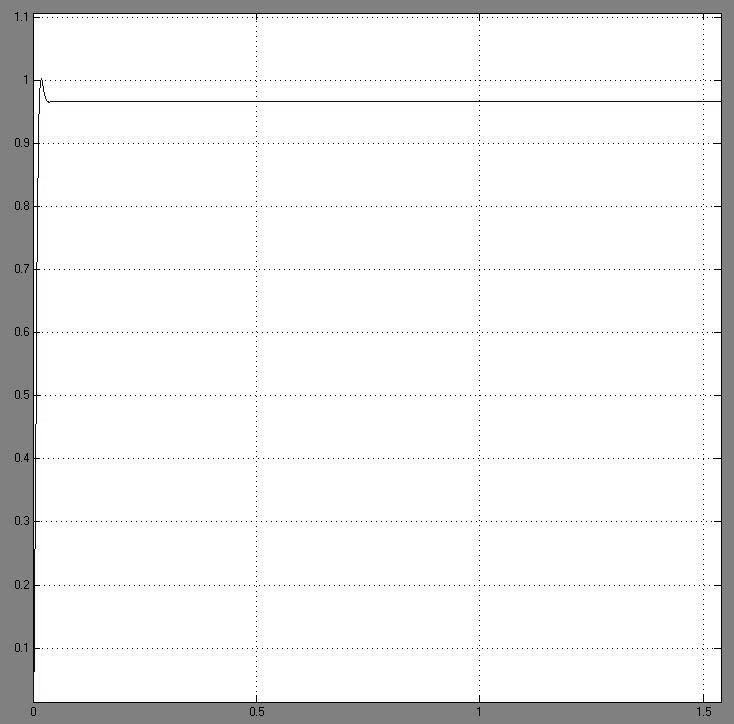
tp=0.02 с (7.1)
Т.о время регулирования соответствует поставленным в ТЗ требованиям.
Оценим статическую ошибку системы.
 (7.2)
(7.2)
Т.о. статическая ошибка системы не превышает допустимого значения.
Оценим перерегулирование системы.
 (7.3)
(7.3)
Т.о. перерегулирование системы удовлетворяет требованиям Т.З.
Проведем анализ помехозащищенности системы методом коэффициентов ошибок для расчета ошибки от действия постоянной составляющей момента.
Определим расположение частоты гармонической помехи относительно частоты среза. Частота помехи известна из задания к работе.

Найдем передаточную функцию системы по ошибке:
 (7.4)
(7.4)
Т.о. получим:

 (7.5)
(7.5)
Для определения статической ошибки, рассчитаем коэффициент
 (7.6)
(7.6)
Получим:
 (7.7)
(7.7)
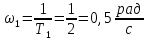
Оценим спектральную плотность помехи:
Спектральная плотность помехи в виде периодического сигнала имеет вид двух δ – функций, расположенных симметрично относительно начала координат.



-ω1 0ω1
Будем рассматривать спектральную плотность только в области положительных частот. Тогда получим:
 (7.8)
(7.8)
Определим спектральную плотность помехи:
 (7.9)
(7.9)

Дисперсию определим интегрируя
 по всем частотам
по всем частотам
Используя фильтрующее свойство δ функции, получим


Среднеквадратичная ошибка равна


Тогда суммарная ошибка системы равна сумме ошибки от действия постоянной составляющей момента и 3 СКО. Получим:

Найдём конструкционное решение корректирующего устройства.
Реализацией передаточной функции W(s)=30 является усилитель мощности, выполненный на основе операционного усилителя. Т.к. свойства схем на ОУ определяются видом ОС и не зависят от типа самого ОУ, то рассчитаем только параметры обратной связи:
Рассчитаем параметры ОС для неинвертирующего усилителя:

Примем R1=100 Ом.
Определим значение R2

Реализацией передаточной функции
 будет являться пассивный четырёхполюсник
следующего вида:
будет являться пассивный четырёхполюсник
следующего вида:
Для расчета параметров элементов зададимся значением

R1рассчитаем из условия:

Отсюда:
R2рассчитаем из условия:
Отсюда:
R2=900кОм.
Окончательный вид корректирующего устройства: