

1. Конструктивная схема сау
САУ предназначена для управления приводами подач копировального фрезерного станка.
Р исунок
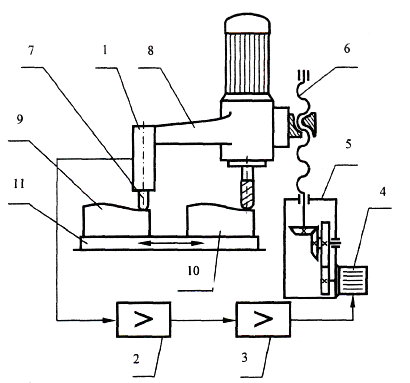
1- Конструктивная схема САУ
исунок
1- Конструктивная схема САУ
Копировальный фрезерный станок предназначен для обработки сложных поверхностей деталей по копиру.
САУ копировального фрезерного станка состоит из преобразователя перемещения 1, усилителя 2, тиристорного усилителя преобразователя З, управляемого двигателя 4, редуктора 5 с винтом 6. Преобразователь перемещения 1 имеет щуп 7 и закреплен на фрезерной бабке 8. Копир 9 и обрабатываемая деталь 10 установлены на столе 11, которому сообщается движение задающей подачи от отдельного привода.
При включении привода задающей подачи щуп 7 преобразователя 1 взаимодействует с профилем копира 9 и вырабатывает сигнал в виде напряжения, пропорционального отклонению щупа. Это напряжение через усилитель 2 поступает на вход усилителя-преобразователя З и
вызывает вращение двигателя 4. Двигатель 4 через редуктор 5 и винт 6 вызывает смещение фрезерной бабки 8 в сторону уменьшения рассогласования. Корпус преобразователя перемещения 1 закреплен на фрезерной бабке, чем обеспечивается отрицательная обратная связь САУ.
Таким образом, фреза будет отслеживать перемещение щупа 7 и формировать требуемый профиль детали. В САУ в качестве объекта управления входит процесс резания в упругой технологической системе станка[5, 27 стр.].
В соответствии с заданием в качестве исходных данных примем следующие параметры.
Исходные данные
Таблица 1.

![]()
2. Описание функциональной схемы сау
Схема системы автоматического управления подачей при копировании приведена на рисунке 2. В систему автоматического управления необходимо ввести элементы:

Рисунок 2 - Функциональная схема САУ,
где: У – усилитель, Д – двигатель, Р – механический редуктор, ТП – тиристорный преобразователь, ПЛП – преобразователь линейных перемещений, ХВ – ходовой винт, ПР – процесс резания, УСС – упругая система станка.
Момент двигателя главного движения пропорционален силе резания и определяет ток в цепи питания, т.е преобразователь тока в цепи питания двигателя, вырабатывает сигнал пропорциональный силе резания. В результате этот сигнал поступает на вход сравнивающего устройства и сравнивается с входным заданным сигналом. В результате на вход электронного усилителя поступает сигнал ошибки, который вызывает изменение напряжения питания двигателя постоянного тока, а, следовательно, и скорость подачи стола.
3. Разработка структурной схемы сау
 Разработка
структурной схемы САУ осуществляется
на основе функциональной схемы системы
(рисунок 2). В структурной схеме в отличии
от функциональной должны быть определены
все передаточные функции.
Разработка
структурной схемы САУ осуществляется
на основе функциональной схемы системы
(рисунок 2). В структурной схеме в отличии
от функциональной должны быть определены
все передаточные функции.

Рисунок 3.1 - Структурная схема САУ
Передаточные функции элементов системы. [5, 30 стр.]
Э лектронный
усилитель
лектронный
усилитель
 ,
,
где: ТЭУ - постоянная времени электронного усилителя, с;
UВЫХ - выходное напряжение, В;
UВХ - входное напряжение, В;
КЭУ - коэффициент усиления.
Передаточная функция электронного усилителя
(апериодическое звено I порядка)

Подставляя значения получим:
![]()
 Э
Э лектродвигатель
постоянного тока
лектродвигатель
постоянного тока
 ,
,
где ТЯ - электромагнитная постоянная времени якоря, с;
ТМ - электромеханическая постоянная двигателя, с;
w - угловая скорость, с-1;
KД - коэффициент передачи электродвигателя, 1/сВ;
UД - напряжение якоря, В.
Передаточная функция электродвигателя постоянного тока
(колебательное звено)

Подставляя значения получим:
 ;
;
![]() ;
;
 ;
;

Механический редуктор

![]()
Передаточная функция механического редуктора
![]()
Подставляя значения получим:
![]()
 Тиристорный
усилитель-преобразователь
Тиристорный
усилитель-преобразователь

![]()
где: ТТП – постоянная выхода тиристорного преобразователя, с;
Uвых – выходное напряжение, В;
Uвх – входное напряжение, В;
КТП – коэффициент передачи (усиления).
Подставляя значения получим:
![]()
П реобразователь
линейного перемещения
реобразователь
линейного перемещения
![]()
где: Uвых – выходное напряжение преобразователя, В;
Kn – коэффициент передачи, В/мм;
Sвх – входное перемещение, мм.
Подставляя значения получим:
WПЛП = KП = 20;
Ходовой винт

![]()
Передаточная функция ходового винта
![]()
Подставляя значения получим:
![]()

 Процесс
резания
Процесс
резания
Передаточная функция процесса резания:
W=КР / (Тр+1)
где Кр – коэффициент резания
Тр – постоянная времени стружкообразования, с.
Сила резания при полном фрезеровании торцовой фрезой:

![]() ;
;
![]()
где: СР – постоянный коэффициент, зависящий от свойств
обрабатываемого материала
t – глубина резания, мм;
S – подача, мм/об;
Подставляя значения получим:
WПР = КР / (Т∙р+1);
KP = KPS*KPt ;
KPS = PХ / SХ=3,34/0,00013=25668,46; KPt=PХ / t=3,34/2=1,67;
n=(30*13,3)/3.14=127,36;
SХ= SМ/(Z·n)=0,00013;
![]()
KP =1,67*25668,46=42866,33
![]()