

2.4 Выбор корректирующего устройства.
По заданным показателям качества – перерегулированию σ=30%, времени перерегулированияtрег строится желаемая ЛАЧХLж. Оно основано на связи переходного процесса с вещественной характеристикой замкнутой системы и ЛАЧХ разомкнутой системы. Для синтеза используется типовая вещественная характеристика замкнутой системыP3(ω):
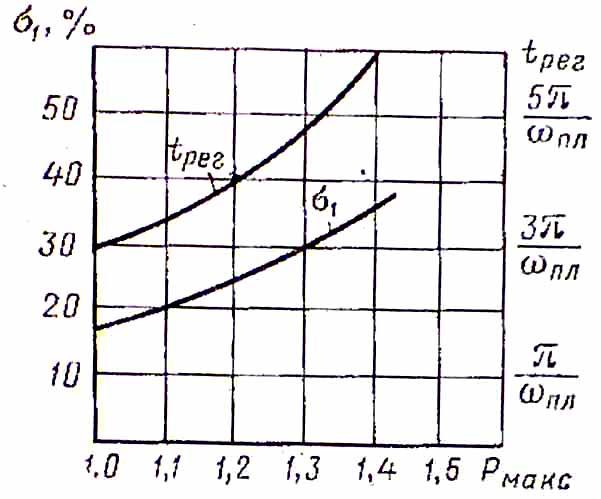
Рис. 2.4. Зависимость tрег=f(Pмакс).
Pмин≈1 - Pмакс
Общее регулирование:
![]()
,где значения σ1(Pмакс) выбирается из рис. 2.4
Тогда по графику, приведённому на рис. выбираем σ1=24% , тогда
![]()
![]()
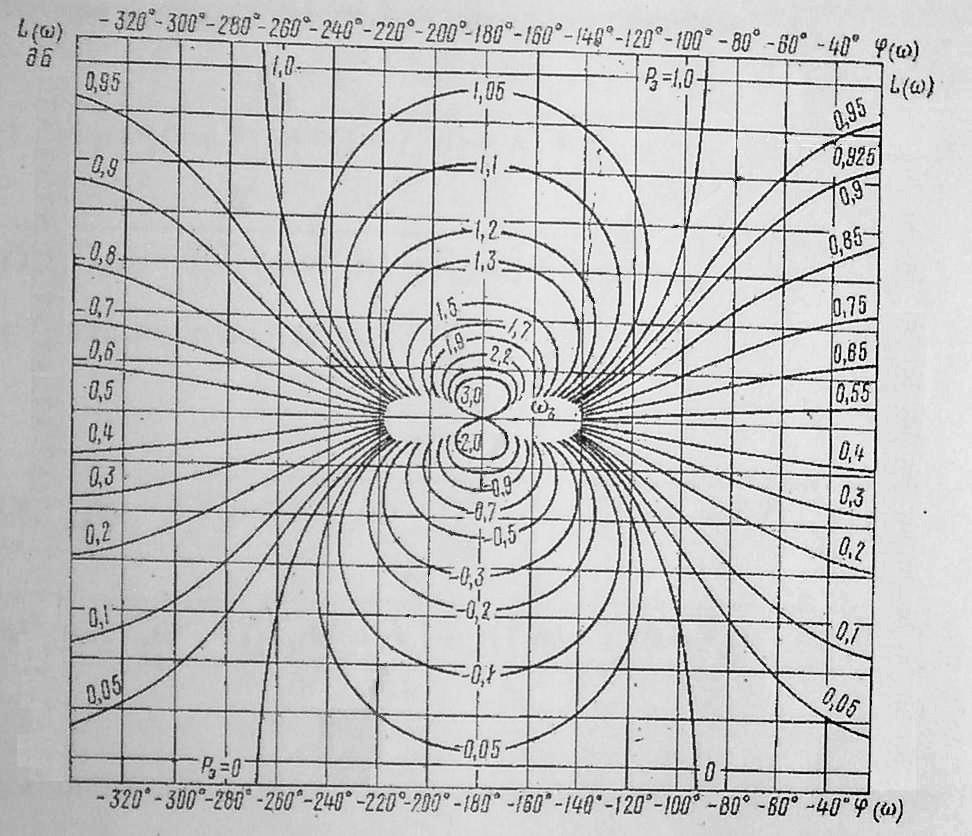
Рис. 2.5 Номограмма P3(ω)=const в плоскости φ.
Из рис. видно, что условие соответствует тому, чтобы ЛФЧХ не заходила в запретную область, ограниченную кривыми с индексами Pмакс =1,2 иPмин=-0,2. Приближенно эти кривые заменяют прямоугольником с параметрамиL1=16дБ,L2=16дБ. ВеличиныL1 иL2 будут определять запас по фазе устойчивости по амплитуде в диапазоне частотωL1 иωL2. Частота среза желаемой ЛАЧХ выбирается из условия:
![]() (2.4.1)
(2.4.1)
Определяя место пересечения вещественной части вещественной частотной характеристики с осью абсцисс получим ωпл.
Передаточная функция замкнутой исходной системы:
 (2.4.2)
(2.4.2)
Выделим вещественную часть:
Умножим числитель и знаменатель на выражение. Тогда получим:
 (2.4.3)
(2.4.3)
![]() выразим
выразим
![]()

![]()
Выразим. Из формулы
найдём
![]() :
:
![]()
Теперь, когда
мы располагаем полной информацией обо
всех элементах системы, мы имеем
возможность вплотную заняться вопросом,
связанным с обеспечением устойчивости
линейной части системы. Необходимость
коррекции линейной части системы были
доказаны в разделе 2.1 , и там же была
приведена структурная схема непрерывной
системы, передаточная функция разомкнутой
системы, её ЛАЧХ и ЛФЧХ. Для того, чтобы
система удовлетворяла требуемым
показателям качества, необходимо
подобрать корректирующее устройство,
чтобы в
результате его применения обеспечить
в системе запас по фазе
![]() =40°.
Как правило, такой запас по фазе
обеспечивается наклоном желаемой ЛАЧХ
-20дБ/дек на частоте среза в том случае,
если интервал, на котором ЛАЧХ сохраняет
этот наклон, составляет не меньше декады.
Пользуясь этой рекомендацией, построим
желаемую ЛАЧХ системы в одних координатах
с ЛАЧХ исходной системы Рис. 2.6.
=40°.
Как правило, такой запас по фазе
обеспечивается наклоном желаемой ЛАЧХ
-20дБ/дек на частоте среза в том случае,
если интервал, на котором ЛАЧХ сохраняет
этот наклон, составляет не меньше декады.
Пользуясь этой рекомендацией, построим
желаемую ЛАЧХ системы в одних координатах
с ЛАЧХ исходной системы Рис. 2.6.
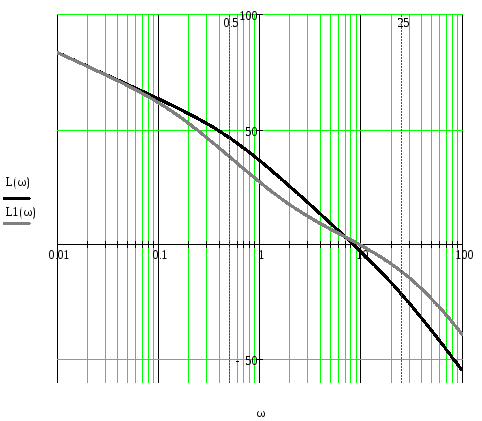
Рис. 2.6. ЛАЧХ
L(![]() )
исходной и ЛАЧХL1(
)
исходной и ЛАЧХL1(![]() )
желаемой систем.
)
желаемой систем.
В этом случае ЛАЧХ корректирующего устройства вычисляется путём вычитания из ЛАЧХ желаемой ЛАЧХ исходной системы:
![]()
ЛАЧХ корректирующего устройства, полученная таким образом, приведена на Рис. 2.7. Из неё довольно просто можно получить вид и параметры этого устройства:
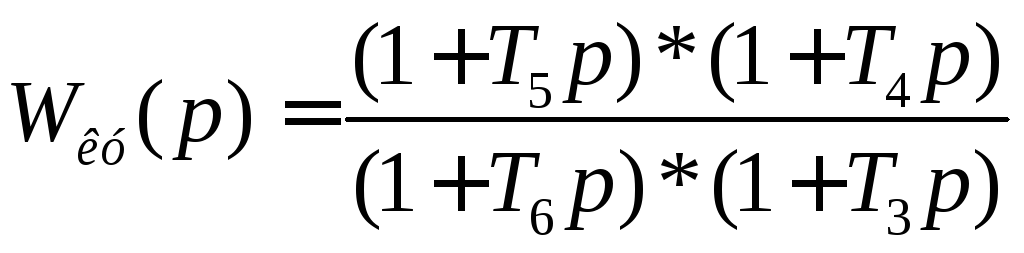 (2.4.4)
(2.4.4)
, где
T3=0,02c;
T4=0,5c;
T5=2c;
T6=7,24c;
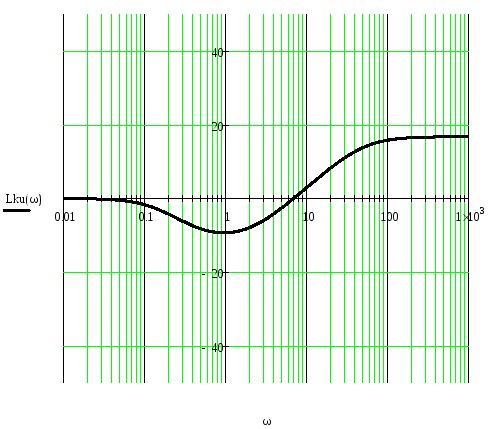
Рис. 2.7. ЛАЧХ корректирующего устройства.
ЛФЧХ корректирующего устройства в данном конкретном случае рассчитывается по формуле:
![]()
ЛФЧХ желаемой системы будет вычисляться, как сумма ЛФЧХ исходной системы и корректирующего устройства:
![]()
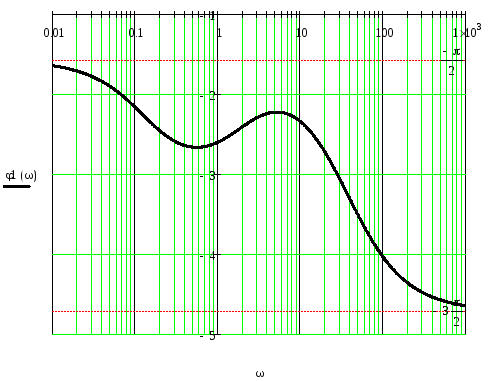
Рис. 2.8. ЛФЧХ желаемой системы .
Анализируя полученные характеристики,
можно сказать, что выбранное корректирующее
устройство вполне удовлетворяет
требованию по обеспечению необходимого
запаса по фазе. При использовании этого
корректирующего устройства обеспечивается
запас по фазе
![]() на частоте среза
на частоте среза
![]()
Так как корректирующее устройство включено последовательно в структуру системы, то передаточная функция всей системы в разомкнутом виде будет определяться, как :

Чтобы получить
полную структурную схему скорректированной
линейной непрерывной системы, приведённой
на Рис. 2.9. нужно добавить в нескорректированную
систему корректирующее звено![]() .
.
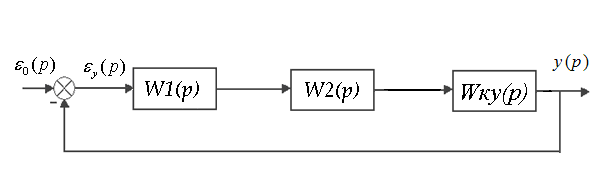
Рис. 2.9.Структурная схема скорректированной линейной непрерывной системы.
Выводы
В этой главе были определены показатели качества линейной системы. Построены ЛАЧХ и ЛФЧХ, и на основе их анализа были сделаны выводы о неудовлетворительности исходной системы заданным критериям качества.
Также были определены ошибки: ошибка в изображении по Лапласу, статическая ошибка, кинетическая, а также ошибка по ускорению. Проведено исследование условий устойчивости исходной системы.
На основе исследования и расчета было выбрано корректирующее устройство. Проведена коррекция исходной системы. Построены ЛАЧХ и ЛФЧХ скорректированной системы, на основе их анализа был сделан вывод о том, что показатели системы удовлетворяют заданным.