

Глава 2 Определение показателей качества работы линейной системы управления антенной.
2.1 Структурная схема исходной системы.
Прежде, чем проводить исследования СНА с нелинейным элементом, рассмотрим модель линейной непрерывной системы. Естественно, что для моделирования составим структурную схему модели.
При построении структурной схемы непрерывной следящей системы за основу примем структурную схему, приведённую на рис. 1.2. , которая иллюстрирует работу грубого контура системы наведения антенны.
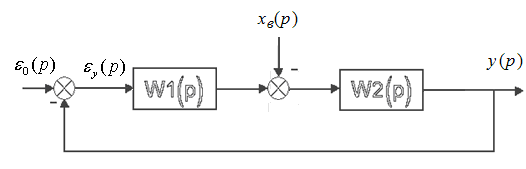
Рис. 2.1. Структурная схема исходной системы.
![]() и
и
![]() тогда
тогда
Передаточная функция разомкнутой системы будет иметь вид:
![]() (2.1.1)
(2.1.1)
В этом случае ЛАЧХ будет рассчитываться и строиться в соответствии с формулой:
![]() (2.1.2)
(2.1.2)
и ЛФЧХ по формуле:
 (2.1.3)
(2.1.3)
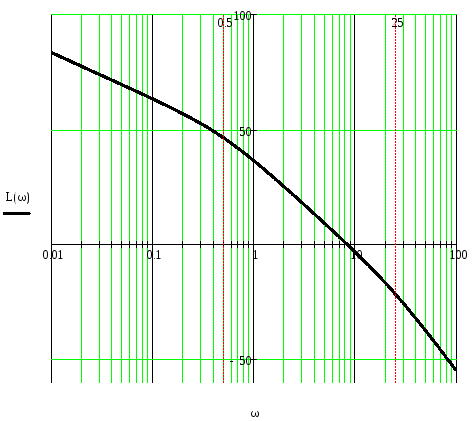
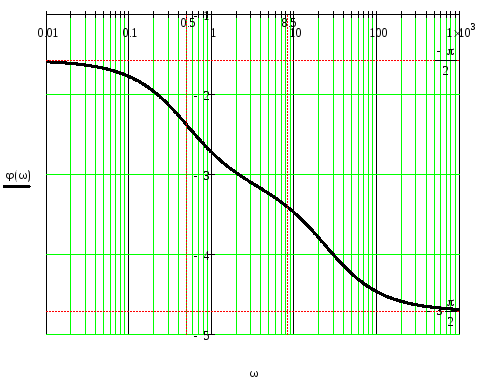
Рис. 2.2. ЛАЧХ и ЛФЧХ исходной системы
Из технического задания известно, что запас по фазе Y=40°.
Исходя из этого, анализируя полученные
ЛАЧХ и ЛФЧХ можно сделать вывод о
неудовлетворительности исходной системы
управления антенной заданным критериям
качества, так как здесь запас по фазе
Y=8°. Очевидно, что в данном случае
введение в систему корректирующих цепей
просто необходимо. Корректирующие цепи
предусмотрим в структурной схеме
отдельным звеном с передаточной
функцией
![]() .
.
2.2 Определение и анализ прямых показателей качества.
Основное условие работоспособности систем автоматического управления заключается в её устойчивости. Однако устойчивость - не единственное условие необходимое для практического применения системы. Наряду с этим выдвигаются определённые требования к качеству процессов регулирования. Комплекс требований, определяющих поведение системы в установившемся и переходном режимах отработки заданного воздействия, определяется показателями качества: прямыми показателями качества (быстродействием и плавностью протекания переходного процесса), определяемыми по переходной характеристике САУ, косвенными (запасами устойчивости по амплитуде и фазе), точностью.
Точность САУ определяется ошибкой,
которая равна разности между задающими
значениями и значениями выходного
сигнала при
![]()
![]() (2.2.1)
(2.2.1)
В соответствии со структурной схемой САУ (рис. 2.1) ошибка в изображении по Лапласу:
![]() (2.2.2)
(2.2.2)
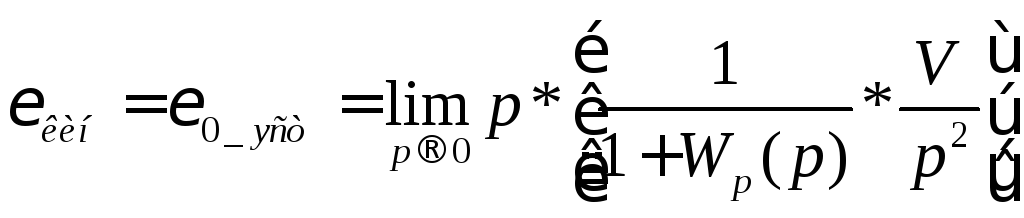
Уравнение (2.2.1) даёт возможность получить ошибку и в переходном и в установившемся режимах по управляющему и возмущающим воздействиям. Для определения ошибки в установившемся режиме можно воспользоваться теоремой о предельном значении преобразования Лапласа:
![]() (2.2.3)
(2.2.3)
В зависимости от вида входного сигнала получаем различные виды ошибок. Так, при подаче на вход ступенчатого воздействия в установившемся режиме имеет место статическая ошибка:
 (2.2.4)
(2.2.4)


![]()
Кинетическая
ошибка
![]() или скоростная, возникает в установившемся
режиме после отработки линейного
входного воздействия:
или скоростная, возникает в установившемся
режиме после отработки линейного
входного воздействия:![]() или
или![]() ,
,
где
 (2.2.5)
(2.2.5)
 При
отработке входного воздействия,
изменяющегося по квадратичному закону
При
отработке входного воздействия,
изменяющегося по квадратичному закону
![]() ,
в установившемся режиме возникает
ошибка по ускорению:
,
в установившемся режиме возникает
ошибка по ускорению:
 (2.2.6)
(2.2.6)

Как видно из формул, все виды ошибок зависят не только от вида входного сигнала, но и от структурной системы, а точнее от порядка астатизма системы, равного разности числа интегрирующих и дифференцирующих звеньев, лежащих цепи обратной связи по отношению к заданному входному сигналу и сигналу ошибки.