

1.1.3 Режим «Поиск»
«Поиск» - программный
режим дальнейшего нацеливания антенн
при использовании
непрерывных излучателей, для создания
обратной связи по лазерному лучу.При решении задачи
поиска с диаграммой направленности
антенны
![]() ,
угловых
секунд в зоне
,
угловых
секунд в зоне
![]() угловых
минут затрачивается очень большое
время, поэтому в целях сокращения этого
времени и с учётомэнергетических
возможностей ИСЗ представляется
расширить
диаграмму
направленности
антенны до величины
угловых
минут затрачивается очень большое
время, поэтому в целях сокращения этого
времени и с учётомэнергетических
возможностей ИСЗ представляется
расширить
диаграмму
направленности
антенны до величины
![]() угловых
минут.
угловых
минут.
Такой подход значительно сокращает время дальнейшего взаимного нацеливания антенн с непрерывными приёмо-передатчиками. Функциональная схема СНА в режиме «поиск» является незамкнутой по оптическому лучу. Режим поиска осуществляется до тех пор, пока на входе непрерывного приёмника не появится сигнал от другого. В этом случае система наведения антенн окажется замкнутой по оптическому лучу ивозникает возможность осуществления режима непрерывного захвата.
1.1.4 Режим «Автосопровождение»
Задача системы в этом режиме поддерживать установившееся значение
![]() пределах меньше
пределах меньше
![]() .
.
В случае отсутствия сигнала некоторый заданный промежуток времени в режиме автосопровождения или при превышении величины ошибки
системы
![]() величины
величины
![]() (половины
рабочей диаграммы направленности)
может произойти срыв слежения. В этом
случае устройство управления СНА
должно перейти в режим «Поиск» или
«Захват», с последующим переводом в
режим автосопровождения.Режим автосопровождения
является полезным режимом, т.к. только
в этом режим происходит передача
информации СА-СР.Основной
задачей является оптимизация перечисленных
режимов применительно к этому
условию в режиме «Начальная выставка»
и «Захват» - минимальное время переходного
процесса; в режиме «Поиск» -максимум
вероятности обнаружения при наименьшем
среднем времени поиска, в режиме
автосопровождения максимальное среднее
время между моментами срыва слежения.
(половины
рабочей диаграммы направленности)
может произойти срыв слежения. В этом
случае устройство управления СНА
должно перейти в режим «Поиск» или
«Захват», с последующим переводом в
режим автосопровождения.Режим автосопровождения
является полезным режимом, т.к. только
в этом режим происходит передача
информации СА-СР.Основной
задачей является оптимизация перечисленных
режимов применительно к этому
условию в режиме «Начальная выставка»
и «Захват» - минимальное время переходного
процесса; в режиме «Поиск» -максимум
вероятности обнаружения при наименьшем
среднем времени поиска, в режиме
автосопровождения максимальное среднее
время между моментами срыва слежения.
1.2 Описание системы управления антенной и входящих в неё элементов в режиме автосопровождения.
Основное назначение СНА заключается в наведении максимума диаграммы направленности антенны на космический объект (или любую программно заданную точку на небесной сфере) и сопровождении с требуемой динамической точностью с тем, чтобы обеспечить устойчивую и высококачественную связь.
Динамические свойства СНА зависят от большого числа факторов, которые в основном определяются:
динамикой движения космического объекта и конструктивными особенностями опорно-поворотного устройства антенной установки;
динамическими характеристиками металлоконструкций опорно-поворотного устройства и механизмов антенной установки как объекта управления;
характеристиками возмущений и помех, действующими на систему и
объект управления в процессе слежения за космическими объектами;
- особенностями построения самой СНА в целом.
Сложность реализации высоких требований по точности наведения СНА в большой степени определяется назначением и свойствами объекта управления. В прямой зависимости от этого находятся и устанавливаемые при этом показатели качества управления, являющиеся основой для синтеза систем автоматического управления антенной установкой. Объектом управления является зеркальная система, металлоконструкции опорно-поворотного устройства и механизм наведения антенной установки совместно с исполнительным двигателем.
Суммарная точность, которую может обеспечить СНА, в основном определяется;
точностью и жёсткостью конструкции ОПУ и механизмов наведения АУ в целом и её отдельных частей, в том числе зеркальной системы;
точностью управляющих сигналов ля наведения АУ с помощью привода в соответствии с требованиями сопровождения космического объекта;
точностью, с которой угловое положение исполнительных осей АУ может
быть определено в любой момент бремени, т.е. точность датчиков обратного
контроля.
- динамической точностью, которую может обеспечивать силовой привод АУ в условиях возмущений, действующих на систему в процессе слежения.
По точности к исследуемой системе наведения предъявляются жёсткие требования создание системы с высокой добротностью и широкойполосой пропускания, что приводит к использованию многоконтурного управления.
К одной из самых важных проблем, от успеха решения которой зависят эффективность и качество управляемой АУ, относитсяпроектирование силового следящего привода. Он является исполнительным элементом СНА, без которого невозможна работа ни в одном режиме. Основными факторами, влияющими на выбор типа привода, являются:
требуемая мощность,
- быстродействие;
диапазон регулирования по скорости;
заданная механическая точность;
устойчивость;
надёжность в работе.
Двухконтурная система наведения
Как уже отмечалось, высокая угловая точность достигается построением системы наведения по многоконтурной схеме при совместном использовании сравнительно «грубого», но работающего в большом диапазоне углов и скоростей силового контура, и более точных корректирующих контуров, работающих в поле ошибок силового привода.
Функциональная схема двухконтурной системы наведения с одним датчиком рассогласования представлена на рисунке 1.1.

Рис 1.1 Функциональная схема двухконтурной системы наведения.
Рассмотрим принцип действия двухканальной системы. В двухканальных системах первый (основной) канал обычно называют грубым, а второй канал, работающий от ошибки первого и уменьшающий ошибку системы, называют точным.
Грубый канал в двухканальных системах автоматического управления решает в основном задачи усиления по мощности и воспроизведения на выходе низкочастотных составляющих спектра полезного сигнала. Точный канал предназначен для усиления высокочастотных составляющих спектра мощности полезного сигнала, который вследствие ограничений не в состоянии передать грубый канал. мощности на низких частотах и относительно небольшой мощности на высоких.
1.4 Исходные данные для разработки системы управления антенной.
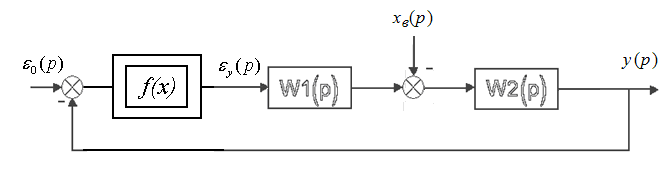
Рис. 1.2Структурная схема точного контура антенной САУ.
![]()
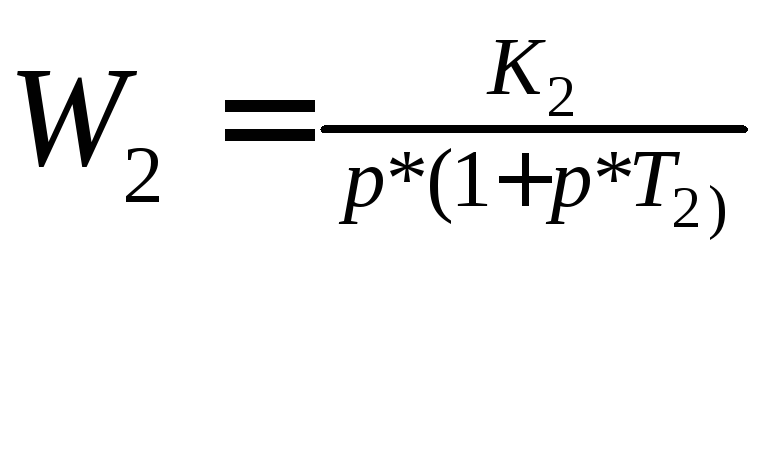 ,где:
,где:
![]() -коэффициент
усиления приёмника усилительно-преобразовательного
устройства;
-коэффициент
усиления приёмника усилительно-преобразовательного
устройства;
![]() - коэффициент
усиления исполнительного устройства;
- коэффициент
усиления исполнительного устройства;
![]() с
- постоянная времени приёмника
усилительно-преобразовательного
устройства;
с
- постоянная времени приёмника
усилительно-преобразовательного
устройства;
![]() с
- постоянная времени исполнительного
устройства;
с
- постоянная времени исполнительного
устройства;
Максимальная
ошибка точного контура
![]() ;
;
Скорость изменения
входного сигнала поступающего на вход
точного контура
![]()
![]() ;
;
Ускорение входного
сигнала
![]()
![]() ;
;
Запас устойчивости
по фазе
![]() ;
;
Величина максимального
перерегулирования
![]() ;
;
f(x) – нелинейный элемент статическая характеристика которого представлена на рисунке 1.3
с = 27 с; а = 0.03;

Рис. 1.3 Нелинейный элемент типа «Двухпозиционное реле с гистерезисом».
Необходимо:
В данной работе необходимо разработать, а затем провести исследование точного контура системы управления РЛС в режиме автосопровождения цели.
Для достижения поставленной задачи необходимо:
- определить и проанализировать показатели качества исходной системы без учёта нелинейной составляющей;
- определить устойчивость.
- если найденные показатели качества не удовлетворяют заданным, то определить корректирующее устройство.
- рассмотреть уже скорректированную нелинейную СНА.
Выводы Система наведения антенны является сложной динамической системой автоматического регулирования, которая осуществляетфункционирование в последовательно сменяющихся режимах. К одной из самых важных проблем, от успеха решения которой зависят эффективность и качество управляемой АУ, относится проектирование силовогоследящего привода, он является исполнительным элементом СНА, без которого невозможна работа ни в одном режиме.