

3. Расчёт компенсатора возмущений
Внешние воздействия делятся на задающие, сигнал которых система должна воспроизводить, и возмущающие, действие которых нужно нейтрализовать. В нашем случае нужно скомпенсировать возмущающее воздействие.
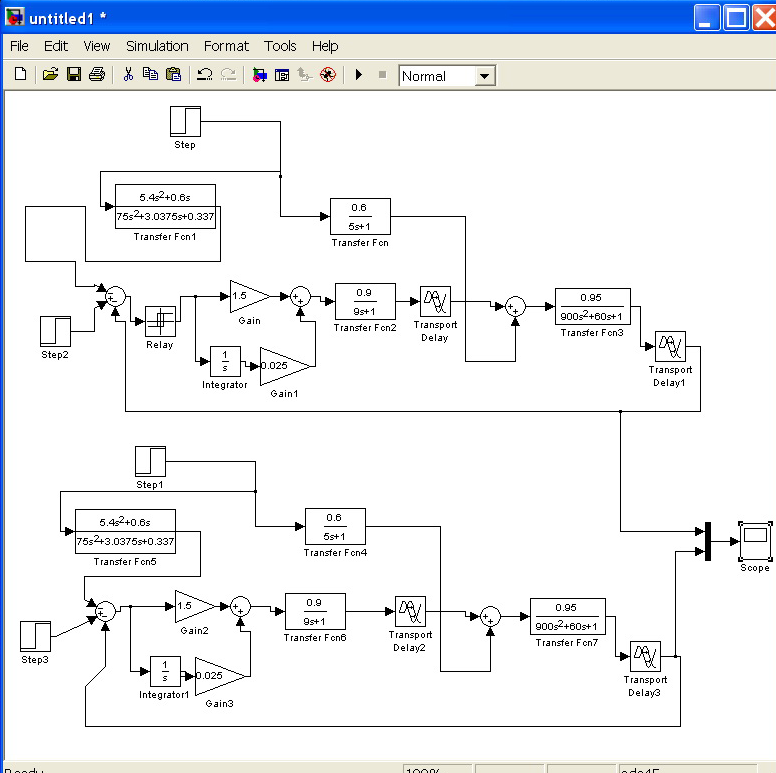
Корректирующие устройства по возмущению. Пусть задана система

![]() Рис.
3.1. Структурная схема системы с возмущением
Рис.
3.1. Структурная схема системы с возмущением
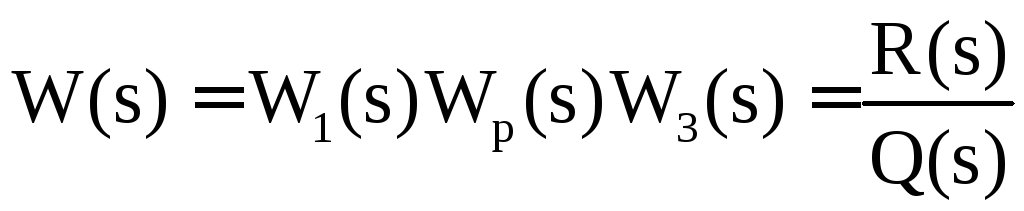
Используя формулу для расчёта компенсатора, получим передаточную функцию следующего вида:

![]()
Пояснение: из разложения экспоненты, мы воспользовались только первым слагаемым (единицей), т.к. если взять второе, третье и др. слагаемые, мы получим передаточную функцию компенсатора, степень числителя которого больше степени знаменателя. А такой компенсатор реализовать невозможно.
Для того, чтобы сравнить, как компенсатор реагирует на возмущение, построим графики переходных процессов без компенсатора и с компенсатором в одной системе координат.
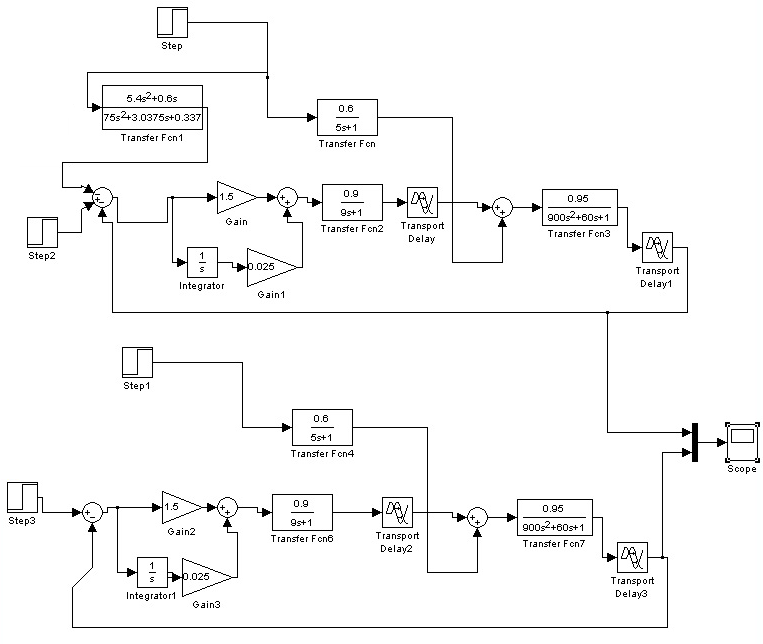
Сравним графики переходных процессов:

Верхний – без компенсатора
Нижний – с компенсатором
Время
регулирования (![]() т.к. отклонение от “1” составляет ± 5%):
190 с
т.к. отклонение от “1” составляет ± 5%):
190 с
Перерегулирование:
![]()
Время быстродействия: 82 с
Статическая
ошибка:
![]() ;
;
Степень
затухания:
![]()
Количество полных колебаний, произошедших до того, как система примет установившееся значение (т.е. не будет выходить из “вилки” [0.95; 1.05]): одно колебание.
4. Релейный элемент в качестве регулятора
Структурная схема нелинейной непрерывной САУ представлена на рис 5.1,где НЭ (f(E))– нелинейный элемент.
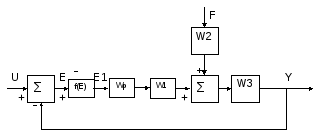
Рис. 4.1
На рисунке 4.2 представлена нелинейность f(E).
|
(Relay) |

Рис. 5.2
Главная
передаточная функция или передаточная
функция замкнутой системы при
![]() :
:

где
 ,
,
 ,
,
 .
.
Если
![]() ,
где
,
где![]() – полиномы относительно
– полиномы относительно![]() ,
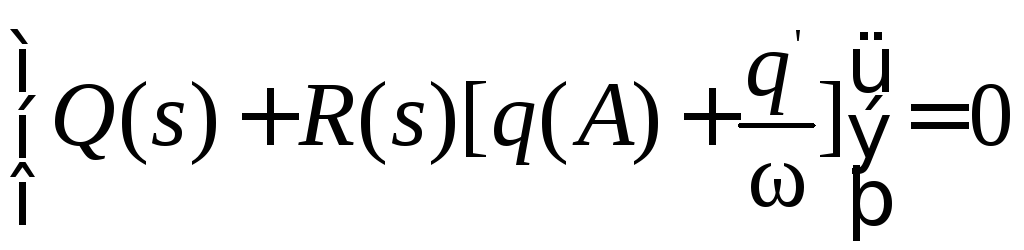
то уравнение свободного движения
замкнутой системы
,
то уравнение свободного движения
замкнутой системы![]() имеет вид
имеет вид![]() ,
где
,
где![]() – оператор дифференцирования. После
гармонической линеаризации
– оператор дифференцирования. После
гармонической линеаризации

и гармонически линеаризованное уравнение замкнутой системы будет
Коэффициенты
гармонической линеаризации
![]() и
и![]() для нашего случая приведены ниже.
для нашего случая приведены ниже.
|
|
|
|
|
|

![]()
Система с нелинейным элементом выглядит следующим образом:
переходной процесс:
Как видно система с нелинейностью ведет себя иначе. Отсутствует перерегулирование и сократилось время регулирования.
Время регулирования (
 т.к. отклонение от “1” составляет ±
5%): 155 с
т.к. отклонение от “1” составляет ±
5%): 155 с
Перерегулирование:

Время быстродействия: 300 с
Статическая ошибка:

переходной процесс:

В нелинейных системах возможна устойчивость в малом, в большом и в целом. Устойчивость в малом означает устойчивость при сколь угодно малых отклонениях от исходного режима. Устойчивость в большом проявляется при конечных отклонениях, возможным по условиям работы. Система устойчива в целом, если она устойчива при неограниченных отклонениях от состояния равновесия.
Исследование нелинейных систем имеет следующие цели, связанные с анализом и синтезом систем:
- анализ устойчивости;
- определение возможности автоколебаний, их частоты и амплитуды;
- определение показателей качества;
- синтез устройств управления.
В зависимости от конкретной цели возможно применение того или иного метода анализа.
Методы исследования нелинейных систем:
- моделирование открывает наиболее широкие возможности анализа динамики и основано на численном интегрировании дифференциальных уравнений с использованием вычислительных машин и специального программного обеспечения. Моделирование позволяет получить переходные процессы, построить фазовый портрет системы, определить устойчивость и возможные автоколебания, оценить показатели качества.
- метод пространства состояний (фазовой плоскости) позволяет определить устойчивость, наличие автоколебательных режимов, их частоту и амплитуду для систем, с достаточной точностью описываемых уравнениями второго порядка. Если порядок уравнений равен трем и больше, возможно построение траекторий в проекциях на фазовые плоскости, соответствующие парам переменных состояния.
- метод точечных преобразований, основанный на свойствах фазовых траекторий, позволяет определить устойчивость движений, соответствующих определенным начальным условиям, и определить возможность автоколебаний.
- прямой метод А. М. Ляпунова позволяет оценить устойчивость нелинейной системы в целом, а метод В.М. Попова дает достаточные условия абсолютной устойчивости.
- метод гармонической линеаризации и гармонического баланса позволяет определить возможность автоколебаний, их частоту, амплитуду и устойчивость.
Все реальные системы изначально являются нелинейными; поэтому, когда мы используем линейную модель реальной системы, мы прибегаем к линеаризации того или иного свойства реальной системы.
Метод гармонической линеаризации относится к приближенным методам исследования автоколебаний. Он позволяет определить условия существования и параметры автоколебаний в нелинейных системах практически любого порядка. Этот метод может быть использован также для исследования вынужденных колебательных режимов и приближенной оценки качества переходных процессов.
Метод гармонической линеаризации опирается на исследование поведения системы при гармоническом (синусоидальном) воздействии, подаваемом на вход нелинейного элемента, и замене периодической кривой на выходе нелинейного элемента первой гармоникой. Погрешность, получаемая при такой замене, сравнительно невелика, т.к. в действительности из-за последующего сглаживающего действия линейной части САУ, являющейся своего рода фильтром низкой частоты, все высокочастотные колебания не пропускаются. Практически они подавляются элементами системы, обладающими инерционностью, например, индуктивностью, механическими массами и др.
Основой метода гармонической линеаризации является предположение о том, что автоколебания приближенно можно искать в синусоидальной форме.
![]() ,
,
где а и w – искомые амплитуда и частота колебаний.
Передаточная функция нелинейного звена выглядит следующим образом:
![]()
Величина q называется гармоническим коэффициентом усиления нелинейного звена.
Линеаризация заключается в замене нелинейной зависимости на прямую линию, в результате чего можно получить точную модель для случая малых отклонений от рабочей точки. Гармоническая линеаризация применяется в системах с внутренними колебаниями. Для некоторых систем вообще невозможно подобрать адекватный метод анализа и единственное, что остается сделать – это прибегнуть к имитационному моделированию. Однако учитывая специфику нелинейных систем, даже если применение какого-то метода анализа является оправданным, полученные результаты, по возможности, должны быть проверенны путем моделирования.