

2. Расчёт регулятора, структуры, параметров
Для системы вида
 Рис.
1.1
Рис.
1.1
Необходимо подобрать регулятор, обеспечивающий желаемый показатель колебательности Мжел и статическая ошибка не должна превышать 1,5%.
Допустимое
значение показателя колебательности
М определяется на основании опыта
эксплуатации систем регулирования.
Считается, что в хорошо демпфированных
системах регулирования показатель
колебательности не должен превосходить
значений
![]() ,
хотя для промышленных систем можно
допускать величины до
,
хотя для промышленных систем можно
допускать величины до
![]() .
.
Расчет регулятора можно свести к следующей методике расчета:
Величина L регулятора, при которой амплитудно-фазовая характеристика разомкнутой системы будет касаться окружности с заданным Мжел, определяется следующим образом:
1) строится амплитудно-фазовая характеристика регулируемого объекта, и из начала координат проводится луч под углом к отрицательной вещественной полуоси;
2) проводится окружность с центром на вещественной отрицательной полуоси, касающаяся одновременно амплитудно-фазовой характеристики регулируемого объекта и этого луча.
Найденное значение коэффициента L определяет его предельно допустимую, по соображениям сохранения системой требуемого запаса устойчивости, величину; для обычно встречающихся на практике частотных характеристик объектов это условие будет выполняться, если установленное в регуляторе значение kp не будет превышать указанной величины.
2.1. Расчет п-регулятора
Для расчета регулятора воспользуемся математическим пакетом MatLab.

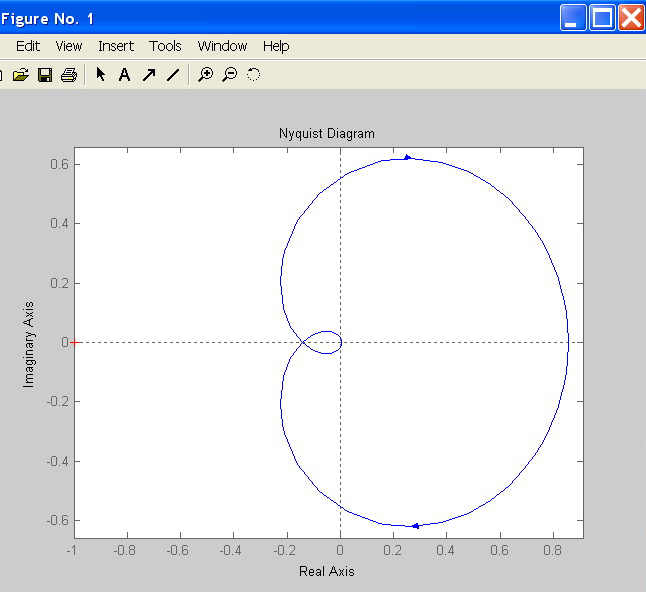
Рис.2.1
Из графика АФЧХ нашей системы отчетливо видно, что данный для рассмотрения мне объект устойчив: по критерию Найквиста.
величина желаемого показателя качества Мжел.
Проверим обеспечения заданной точности.

Получим значение Ep= 0.384, что не удовлетворяет условию задания.
2.2. Расчет пи-регулятора
Величина L регулятора, при которой амплитудно-фазовая характеристика разомкнутой системы будет касаться окружности с заданным Мжел, определяется следующим образом:
1) строится амплитудно-фазовая характеристика регулируемого объекта, и из начала координат проводится луч под углом к отрицательной вещественной полуоси;
2) проводится окружность с центром на вещественной отрицательной полуоси, касающаяся одновременно амплитудно-фазовой характеристики регулируемого объекта и этого луча.
Найденное значение коэффициента L определяет его предельно допустимую, по соображениям сохранения системой требуемого запаса устойчивости, величину; для обычно встречающихся на практике частотных характеристик объектов это условие будет выполняться, если установленное в регуляторе значение kp не будет превышать указанной величины.
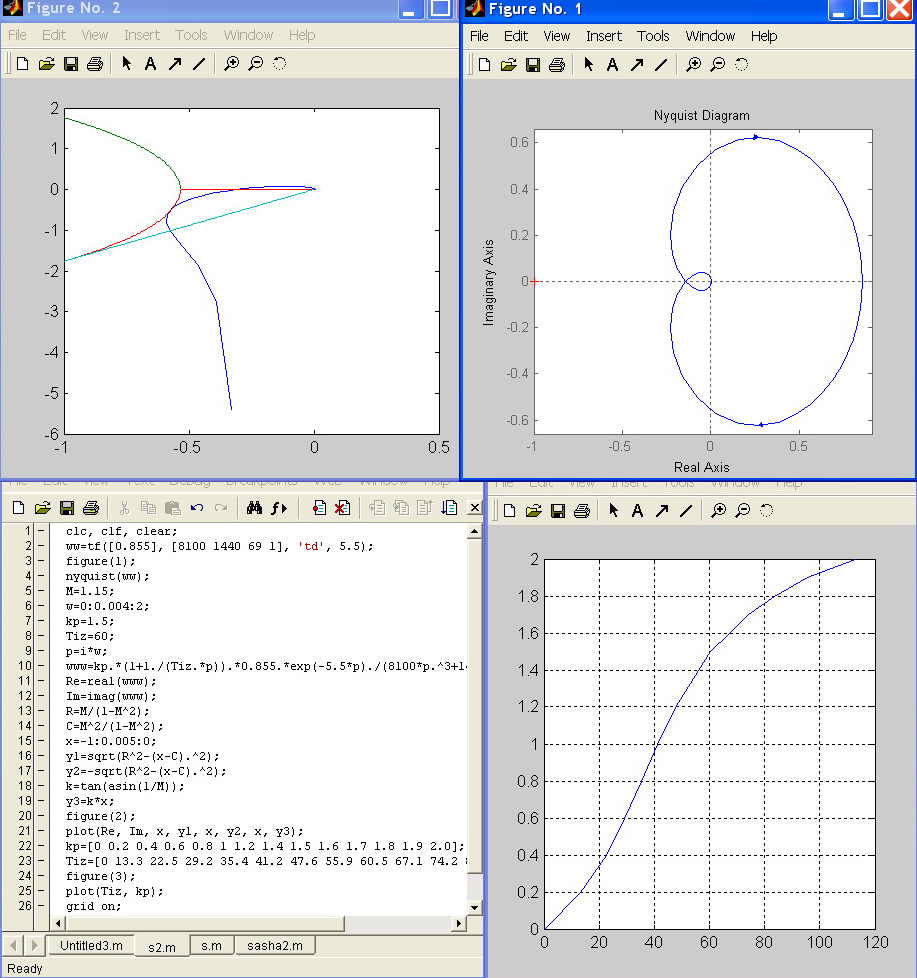
Рис. 2.5. АФЧХ
Найдем
значение ki
:

Таким
образом, получаем, что
![]()
Получив соответствующие значения kp и ki, промоделируем нашу систему с регулятором, используя приложение к математическому пакету MatLab – Simulink:

Рис. 2.8. Структурная схема объекта с ПИ-регулятором
Переходной процесс для данной схемы выглядит следующим образом:

Рис. 2.9
Время
регулирования (![]() т.к. отклонение от “1” составляет ± 5%):
145 с;
т.к. отклонение от “1” составляет ± 5%):
145 с;
Перерегулирование:
![]()
Время быстродействия: 95 с;
Статическая
ошибка:
![]()
![]()
Степень
затухания:
![]() Количество
полных колебаний, произошедших до того,
как система примет установившееся
значение (т.е. не будет выходить из
“вилки” [0.95; 1.05]): одно колебание.
Количество
полных колебаний, произошедших до того,
как система примет установившееся
значение (т.е. не будет выходить из
“вилки” [0.95; 1.05]): одно колебание.
Т.к. наша система вышла на заданный уровень (на единицу), значит теперь нам необходимо найти Мфакт. (фактическое значение показателя колебательности) и сравнить его с Мжел. (желаемое значение показателя колебательности).