

4. Синтез корректирующего устройства методом незатухающих колебаний.
В соответствии с этим методом, расчет настроек регулятора проводят в два этапа. На первом этапе определяют критические настройки пропорциональной составляющей L1кр, при условии, что остальные настройки равны L0 = L2 = 0, и колебательность равна m = 0 при которых система управления будет находиться на грани устойчивости, и соответствующая ей частота wкр. На втором этапе по L1кр и wкр определяют оптимальные настройки регуляторов L0, L1, L2, обеспечивающие коэффициент затухания ξ = 0,8÷0,9.

Оптимальные настройки регуляторов находят по следующим формулам:
П-регулятор: L1 = 0.5*L1кр
ПИ-регулятор: L1 = 0.45*L1кр
L0 = 0.086*L1кр*wкр
ПИД-регулятор: L1 = 0.6*L1кр
L0 = 0.192*L1кр*wкр
L2 = 0.471*L1кр/wкр
Произведя необходимые вычисления мы увидели, что Wkp=0, следовательно мы не можем найти регуляторы и этот метод нам не подходит.
4. Синтез корректирующего устройства с помощьюMatLabSimulink
Синтез такого корректирующего элемента, в среде MatLab Simulink, возможен при помощи некоторого NCD- Blockset. Инструментальный пакет Nonlinear Control Design Blockset (NCD-Blockset) предоставляет в распоряжение пользователя графический интерфейс для настройки параметров динамических объектов, обеспечивающих желаемое качество переходных процессов. При помощи данного инструмента можно настраивать параметры нелинейной Simulink-модели, в качестве которых может быть заявлено любое количество переменных.
 Задание
динамических ограничений осуществляется
в визуальном режиме. На базе этих
ограничений NCD-Blockset автоматически
генерирует задачу конечномерной
оптимизации так, чтобы точка экстремума
в пространстве настраиваемых параметров
соответствовала выполнению всех
требований, предъявляемых к качеству
процесса. Ход оптимизации контролируется
на экране с помощью отображения графика
контролируемого процесса и текущих
значений минимизируемой функции. По
завершении процесса его результат
фиксируется в рабочем пространстве.
Задание
динамических ограничений осуществляется
в визуальном режиме. На базе этих
ограничений NCD-Blockset автоматически
генерирует задачу конечномерной
оптимизации так, чтобы точка экстремума
в пространстве настраиваемых параметров
соответствовала выполнению всех
требований, предъявляемых к качеству
процесса. Ход оптимизации контролируется
на экране с помощью отображения графика
контролируемого процесса и текущих
значений минимизируемой функции. По
завершении процесса его результат
фиксируется в рабочем пространстве.
1) Запускаем MatLab Simulink и в чистом листе, строим свою систему, выбирая и перенося на лист нужные нам блоки из библиотеки Simulink. Задаем необходимые параметры наших блоков, дважды нажав на интересующий нас блок. В PID-контролере задаем наши переменные (kp; ki; kd), которые соответствуют коэффициентам нашего корректирующего элемента (L1; L0; L2). В блоках управляющих устройств задаем наши передаточные функции прямой и обратной связи. В командном окне simulation parameters выставляем время нашего процесса. Схема системы показан на рисунке.


2) Инициализируем в командном окне MatLab переменные kp=1; ki=1; kd=0.1.
3) Дважды щелкнем по блоку NCD Outport и получим окно NCD-Blockset, в котором мы и будем визуально наблюдать за оптимизацией нашей системы. В командном окне optimization parameters зададим наши переменные (kp; ki; kd), относительно которых и будет оптимизироваться наша система.
4) Теперь мы можем начать процесс оптимизации нашей системы. Нажмем на кнопку Start и понаблюдаем за развитием процесса. Для каждого этапа оптимизации в окне отображаются графики сигнала. В командном окне MATLAB отображается информация о ходе оптимизации.

5) По окончании процесса оптимизации, оптимальные значения настраиваемых переменных, соответствующие кривой зеленого цвета, сохраняются в рабочем пространстве MatLab:

kd =0.0045
ki =7.2862e-004
kp =0.0120
6) Так как наши переменные тождественно ровны коэффициентам нашего корректирующего звена ( kp = L1; ki = L0; kd = L2), мы можем определить передаточную функцию корректирующего элемента:
![]()
7) Подставляем наш корректирующий элемент в замкнутую систему и построим график ее переходной характеристики Н(t).
![]()
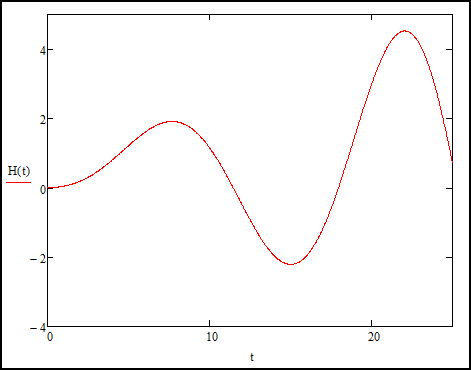
Как видно система не отвечает заданным параметрам качества, следовательно, она нам не подходит.