

3. Синтез корректирующего устройства методом расширенных частотных характеристик
3.1. П-регулятор:R(s) =L1
1) Для П-регулятора рабочую частоту и параметр L1 из условия:

2) Найдём степень колебательности нашей системы:
Wz=Wpr/(Wpr*Woc+1)
20 s^5 + 442 s^4 + 849 s^3 + 190.5 s^2 + 211 s + 20
Wz=---------------------------------------------------------------------------------
0.4 s^7 + 16.04 s^6 + 161.8 s^5 + 30.02 s^4 + 212.8 s^3 + 250.5 s^2 + 43.1 s + 61
Найдём корни характеристического уравнения
![]()
s1=![]()
s2=
![]()
s3=![]()
s4=![]()
s5=![]()
s6=![]()
s7=![]()
![]()
![]()
2) Проведем необходимые вычисления:
![]()

![]()
![]()
![]()
![]()
U(ω)=Re(Wp(s))
V(ω)=Im(Wp(s))
![]()
![]()


ωp1=![]()
ωp2=
![]()
ωp3=
![]()
ωp4=![]()
ωp5=![]()
ωp=0,65
![]()
![]()
![]()

 Подставим
этот регулятор в замкнутую систему и
посмотрим на результат
Подставим
этот регулятор в замкнутую систему и
посмотрим на результат
![]()

Мы увидели, что в результате подключения система стабилизировалась, но её параметры качества не удовлетворяют заданным.
3.2. И-регулятор:R(s) =L0/s
1) Для И-регулятора рабочую частоту и параметр L0 из условия:

2) Проведем аналогичные вычисления мы увидим что ωр найти нельзя поэтому этот регулятор не может быть синтезирован.

3.3. ПИ-регулятор R(s) = L1 + L0/s
 1)
Для ПИ-регулятора угол γ и параметры
L1,
L0
из условия:
1)
Для ПИ-регулятора угол γ и параметры
L1,
L0
из условия:

3 )
Построим зависимостьL0(L1)
для того чтобы найти wn
и
wmax
:
)
Построим зависимостьL0(L1)
для того чтобы найти wn
и
wmax
:
О пределим
ωn
О
пределим
ωn
О
 пределим
ωmax
пределим
ωmax
По графики видно, что нам подходит только одна частота wmax = 83. 2, а wn≤0.
4) Зная частоты wn и wmax, находим рабочую частоту по формулам:
![]()
5) Подставим полученные параметры (m, wр) в нашу систему и получим значения L0 и L1:
![]()
![]()
![]()
Подставим этот регулятор в замкнутую систему и посмотрим на результат:


Мы увидели, что в результате подключения система не стабилизировалась.
3.5. ПИД-регулятор: R(s) = L1 + L0/s + L2*s
 1)
Найдём z
и параметры L1,
L0
из условия:
1)
Найдём z
и параметры L1,
L0
из условия:
2) Задаваясь разными значениями L2, построим несколько графиков зависимости L0(L1) равной степени колебательности, и по графикам определим нужные нам wmax. Возьмем три значения (L2 = 0.1; 0.01; 0.5):
а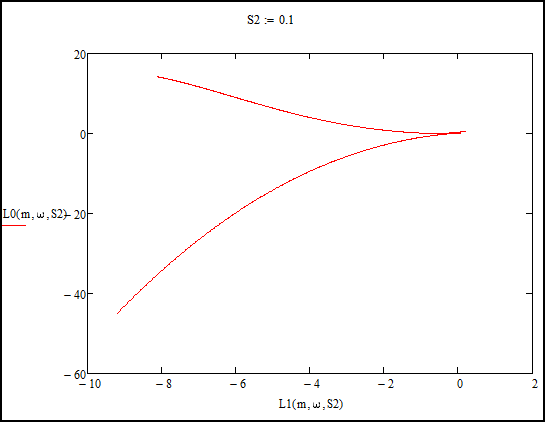 )
)
По графику мы можем определить одну единственную wmax = 14.2.
б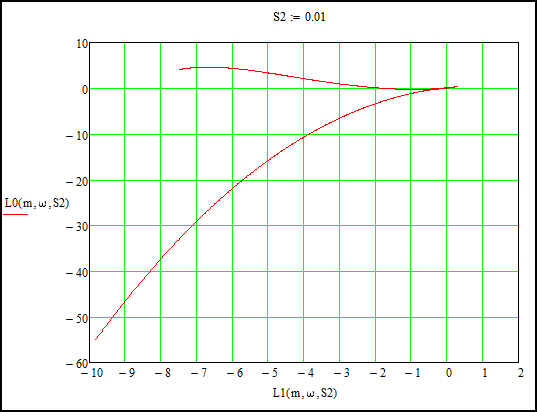 )
)
По графику мы можем определить одну единственную wmax = 4.6.
в )
)
По
графику мы можем опр еделить
одну единственнуюwmax
= 155.
еделить
одну единственнуюwmax
= 155.
3) Зная частоту wmax, находим рабочую частоту по формулам:
![]()
а)
![]()
б)
![]()
в)
![]()
4) Подставим полученные параметры (m и wmax) в нашу систему и получим значения L0, L1, L2:
а) L1 = -18.35; L0 = -177.35; L2 = 0.1
Получим
регулятор
![]() ,
подставим его в нашу систему:
,
подставим его в нашу систему:


Мы увидели, что в результате подключения система не стабилизировалась.
б) L1 = -4.6; L0 = -13.6; L2 = 0.01
Регулятор
![]() подставим его в нашу систему:
подставим его в нашу систему:

Мы увидели, что в результате подключения система не стабилизировалась.

в) L1 = -696.37; L0 = -141149.6; L2 = -141149.6
Регулятор
![]() подставим его в нашу систему:
подставим его в нашу систему:

Мы увидели, что в результате подключения система не стабилизировалась.