

22.3. Непрерывная коррекция импульсных систем.
После построения желаемых ЛАПЧХ необходимо определить корректирующие устройства, обеспечивающие достаточно хорошее приближение частотных характеристик синтезированной системы к желаемым.
В ИС применяются непрерывный и дискретный способы коррекции. В первом варианте осуществляется коррекция введением в систему непрерывных фильтров, во втором - применением дискретных корректирующих устройств.
Рассмотрим вкратце непрерывный способ коррекции.
Непрерывное корректирующее устройство вводится в непрерывную часть системы последовательно или параллельно с имеющимися непрерывными звеньями, образуя местные обратные связи и так далее (рис.22.4).
Далее,
по построенной ЖЧХ
![]() легко определить w-
ПФ
легко определить w-
ПФ
![]() и от нее с помощью обратного
и от нее с помощью обратного
![]() -
преобразования, о котором говорилось
выше, перейти к обычной ПФ ПНЧ
синтезированной системыWНЧ(p),
то есть
-
преобразования, о котором говорилось
выше, перейти к обычной ПФ ПНЧ
синтезированной системыWНЧ(p),
то есть
![]() .
(22.4)
.
(22.4)
Непрерывное КУ должно обеспечить ЛАФЧХ непрерывной части, соответствующие ПФ (22.4). Исходя из схемы включения КУ, можно определить его ПФ.
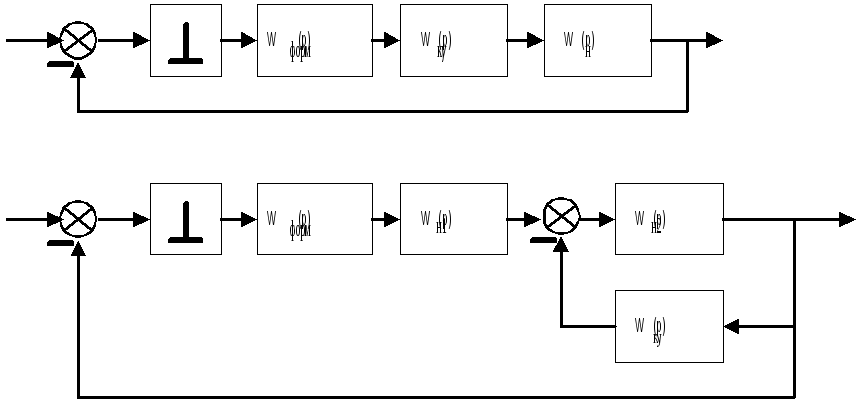
Рис.22.4.
Когда мы рассматривали определение z-ПФ, то сформулировали правило: для случая, если непрерывные звенья не разделены ИИЭ, то необходимо сначала найти эквивалентную ПФ, а затем выполнять z- преобразование.
Рассмотрим более подробно определение WКУ(p):
![]() .
.
Но
ПФ ![]() содержит в себе и
ПФ ОУ WНЧОУ(p)
и ПФ КУ WКУ(p),
то есть:
содержит в себе и
ПФ ОУ WНЧОУ(p)
и ПФ КУ WКУ(p),
то есть:
WЖ(p)= WНЧОУ(p)WКУ(p).
Для получения WКУ(p) необходимо осуществить деление WЖ(p) на W(p):
WКУ(p)= WЖ(p)/ WНЧОУ(p).
Так как
![]() ,
,
при
этом
![]() .
.
Недостатками такого подхода являются:
WКУ(p), как правило, имеет больше нулей, чем полюсов, то есть получаем физически нереализуемое корректирующее устройство;
трудно оценить влияние изменения параметров ОУ на ПЧХ.
Таким образом, обычно такой способ не позволяет непосредственно определить ПФ корректирующих устройств, так как, либо оно не отвечает условиям физической реализуемости, либо оказывается слишком сложным.
Возможен другой подход к синтезу непрерывных корректирующих устройств. Он состоит в том, что сначала находят ЖЛАЧХ непрерывной части, которой соответствовали бы ЛАЧХ дискретной системы, удовлетворяющие предъявленным требованиям. Далее синтез корректирующих устройств ведется также, как и для непрерывных систем.
Здесь
необходимо отметить, что приближенная
реализация непрерывной коррекции может
привести к существенному изменению ПФ
W*w(w).
При этом
частотная характеристика
![]() может отличаться от желаемой, причем
заранее оценить эти отличия очень
трудно.
может отличаться от желаемой, причем
заранее оценить эти отличия очень
трудно.
Таким
образом, при изменении параметров и
структуры коррекции невозможно заранее
оценить последующие изменения ЛАФЧХ
дискретной системы. Для этого нужно
каждый раз выполнять
![]() -
преобразование и строить ЧХ. Поэтому
синтез непрерывных КУ обычно представляет
собой перебор различных вариантов с
последующим анализом каждого из них и
выбором наилучшего. От этого недостатка
свободны другие способы коррекции,
которые будут рассмотрены далее.
-
преобразование и строить ЧХ. Поэтому
синтез непрерывных КУ обычно представляет
собой перебор различных вариантов с
последующим анализом каждого из них и
выбором наилучшего. От этого недостатка
свободны другие способы коррекции,
которые будут рассмотрены далее.