

«Переходы графа операций»
|
Позиция |
Назначение |
|
t0 |
Общий запуск системы |
|
t1 |
Продольное перемещение стола вправо |
|
t2 |
Включение манипулятора |
|
t3 |
Опускание руки робота в крайнее нижнее положение |
|
t4 |
Схват заготовки манипулятором |
|
t5 |
Переход манипулятора в крайнее верхнее положение |
|
t6 |
Подвод руки к столу |
|
t7 |
Отключение схвата руки робота |
|
t8 |
Отключение манипулятора |
|
t9 |
Продольное перемещение стола влево |
|
t10 |
Перемещение режущего инструмента в крайнее нижнее положение |
|
t11 |
Начало обработки |
|
t12 |
Окончание обработки |
|
t13 |
Перемещение режущего инструмента в крайнее верхнее положение |
|
t14 |
Схват обработанной детали рукой робота |
|
t15 |
Отвод руки робота от стола |
|
t16 |
Фиксация детали в кассете |
|
t17 |
Переход системы на цикловой пуск |
|
tx |
Включение счетчика выполнения операций |
|
События - переходы |
Предусловия |
Постусловия |
|
t0 |
P0, Px |
P1, P10 |
|
t1 |
P1,P13,Px |
P7 |
|
t2 |
P0 |
P3 |
|
t3 |
P3, P7 ,Px |
P4 |
|
t4 |
P4 |
P5 |
|
t5 |
P5,P14,P15 |
P6 |
|
t6 |
P6 |
P7 |
|
t7 |
P4,Px |
P2,P8 |
|
t8 |
P15 |
P9 |
|
t9 |
P2,P4,P8 |
P1 |
|
t10 |
P10 |
P11 |
|
t11 |
P11 |
P12 |
|
t12 |
P12 |
P13 |
|
t13 |
P13 |
P10 |
|
t14 |
P2,P7 |
P14 |
|
t15 |
P6 |
P3 |
|
t16 |
P4 |
P15 |
|
t17 |
P13,P9 |
P0 |
|
tx |
P0 |
Px |
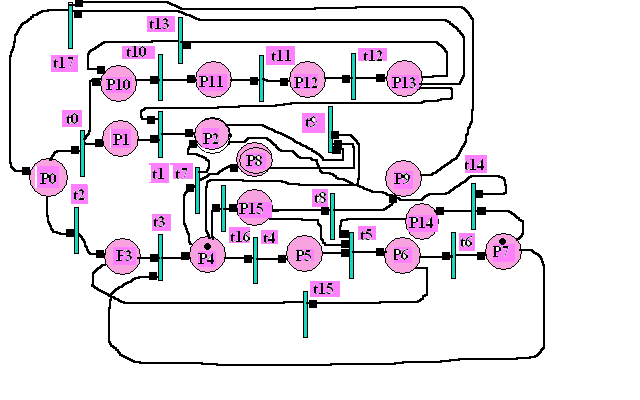
Рис.5
Граф операций работы ртк