

3.3. Частотные критерии устойчивости
Это графоаналитические методы, позволяющие по виду частотных характеристик САУ судить об их устойчивости. Их общее достоинство в простой геометрической интерпретации, наглядности и в отсутствии ограничений на порядок дифференциального уравнения.
3.3.1. Принцип аргумента
Запишем характеристический полином САУ в виде (3.1):
D(p) =
a0![]() (p
- p1)
(p
- p1)![]() (p
- p2)
(p
- p2)![]() ...
...![]() (p
- pn)
= 0.
(p
- pn)
= 0.
Его корни
pi = αi + jαi = |pi|ejarg(pi),
где arg(pi) = arctg(ωi/ai) + kπ,
![]() .
.
Каждый корень можно изобразить вектором на комплексной плоскости (рис.37,а), тогда разность p - pi изобразится разностью векторов (рис.3,7,б), где p - любое число.
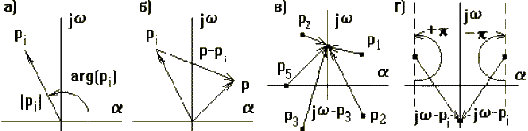
Рис.3.7
Еcли менять значение p произвольным образом, то конец вектора p – pi будет перемещаться по комплексно плоскости, а его начало будет оставаться неподвижным, так как pi - это конкретное неизменное значение.
В частном случае, если на вход системы подавать гармонические колебания с различной частотойω, то p = jω, а характеристический полином принимает вид:
D(jω)
= a0![]() (jω
- p1)
(jω
- p1)![]() (jω
- p2)
(jω
- p2)![]() ...
...![]() (jω
- pn).
(jω
- pn).
При этом концы векторов jω - pi будут находиться на мнимой оси (рис.3.7, в). Если менять ω от – ∞ до +∞, то каждый вектор jω - pi будет поворачиваться относительно своего начала pi на угол +π для левых и - π для правых корней (рис.3.7,г).
Характеристический полином можно представить в виде
D(jω) = |D(jω)|ejarg(D(jω)),
где
|D(jω)|
= a0![]() |jω
- p1|
|jω
- p1|![]() |jω
- p2|...|jω
- pn|,
|jω
- p2|...|jω
- pn|,
arg(D(jω)) = arg(jω - p1) + arg(jω - p2) + .. + arg(jω - pn).
Пусть из n корней m – правые, а n- m – левые, тогда угол поворота вектора D(jω) при изменении ω от -∞ до +∞ равен
![]() ,
,
(3.5)
или при изменении ω от 0 до +∞ получаем
![]() . (3.6)
. (3.6)
Отсюда вытекает правило: изменение аргумента вектора D(jω) при изменении частоты ω от - ∞ до +∞ равно разности между числом левых и правых корней характеристического уравнения, умноженному на π, а при изменении частоты ω от 0 до +∞ эта разность умножается на π/2.
Это и есть принцип аргумента. Он положен в основу всех частотных критериев устойчивости.
3.3.2. Критерий устойчивости Михайлова
Критерий Михайлова предполагает построение годографа на комплексной плоскости. Знаменатель передаточной функции системы в общем случае можно представить выражением:
![]() .(3.7)
.(3.7)
Уравнение (3.7) является комплексным и может быть представлено в виде:
![]() (3.8)
(3.8)
где
![]() , (3.9),
, (3.9),
![]() . (3.10)
. (3.10)
вещественная и мнимая функции Михайлова соответственно.
Построение годографа производится по уравнению вектора D(j) при изменении часты от 0 до .
Так как для устойчивой САУ число правых корней m = 0, то угол поворота вектора D(jω) составит
![]() . (3.11
. (3.11
То есть САУ будет устойчива, если вектор D(jω) при изменении частоты ω от 0 до + ∞ повернется на угол nπ/2.
При этом конец вектора опишет кривую, называемую годографом Михайлова. Она начинается на положительной полуоси, так как D(0) = an, и последовательно проходит против часовой стрелки n квадрантов комплексной плоскости, уход в бесконечность в n - ом квадранте (рис.3.8, а). Причем n определяется порядком полинома характеристического уравнения САУ.
Если это правило нарушается (например, число проходимых кривой квадрантов не равно n, или нарушается последовательность прохождения квадрантов (рис.3.8, б), то такая САУ неустойчива - это и есть необходимое и достаточное условие критерия Михайлова.
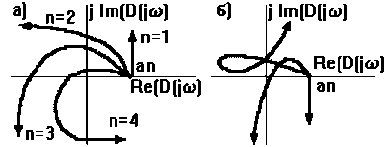
Рис.3.8
К достоинствам этого критерия нужно отнести его наглядность. Так, если кривая проходит вблизи начала координат, то САУ находится вблизи границы устойчивости и наоборот. Этим критерием удобно пользоваться, если известно уравнение замкнутой САУ.