

лабораторная работа / лабар.№3
.docxЦЕЛЬ РАБОТЫ: получение навыков исследования линейных динамических моделей в программном пакете Matlab и ознакомление с временными и частотными характеристиками систем автоматического управления (САУ).
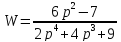
Задана передаточная функция САУ:

![]()





Задание 1.
Создадим LTI-объект с именем w, для этого выполним:
>> w=tf([6 0 -7],[2 4 0 0 9])
Transfer function:
6 s^2 - 7
-----------------
2 s^4 + 4 s^3 + 9
Задание 2.
Найдем полюса и нули передаточной функции с использованием команд pole, zero.
>> pole(w)
ans =
-1.6911 + 0.6773i
-1.6911 - 0.6773i
0.6911 + 0.9373i
0.6911 - 0.9373i
>> zero(w)
ans =
1.0801
-1.0801
Задание 3.
Построим переходную функцию командой step(w). Выполнения отобразить в виде графика.
>> step(w)

Рис.1 Переходная функция h(t)
Задание 4.
Построить импульсную переходную функцию командой impulse(w).
>> impulse(w)
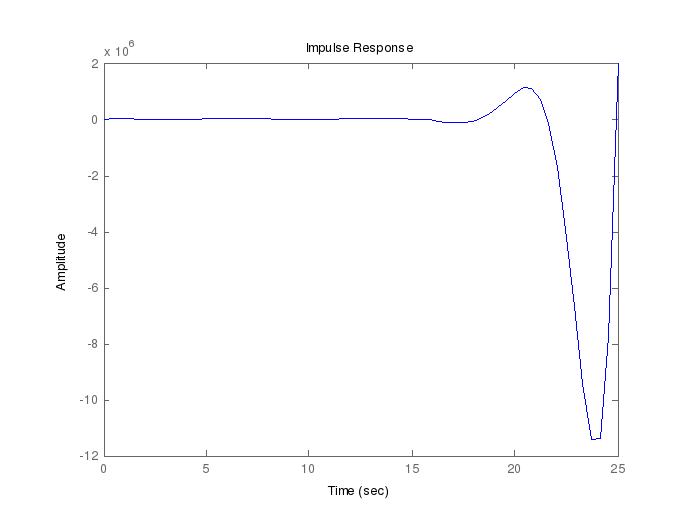
Рис.2 Импульсная переходная функция
Задание 5.
Диаграмму Боде получим, используя команду bode(w).
>> bode(w)

Рис.3 Логарифмические частотные характеристики
Задание 6.
Определим частотный годограф Найквиста, выполнив команду nyquist(w).
>> nyquist(w)
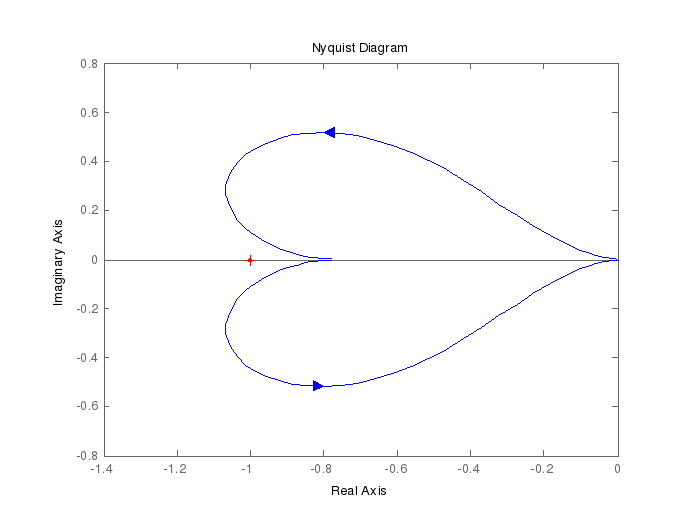
Рис.4 Частотный годограф
ВЫВОД: Провела исследование линейных динамических моделей и ознакомилась с временными и частотными характеристиками САУ, кроме того могу сделать вывод что система, согласно критерию Найквиста будет устойчивой, т.к. не охватывается точка с координатами (-1;0j).