

лабораторная работа / Лаба№10 Синтез систем управления с обратной связью
.docМеждународный университет природы, общества и человека «Дубна»
Кафедра «Персональная электроника»
Лабораторная работа №10
по дисциплине «Основы автоматических систем управления»
Синтез систем управления с обратной связью. Пример синтеза с продолжением: система чтения информации с диска.
|
Выполнил: |
Зернин Н.Д. |
|
Принял: |
проф. Трофимов А. Т. |
Дубна, 2010 г.
Цель работы:
- Провести коррекцию системы управления с помощью схем с опережением и отставанием по фазе.
- Оценить запас устойчивости по модулю и запас устойчивости по фазе.
- Провести синтез регулятора и найти его характеристику.
Теоретическое введение.
В общем случае синтез системы связан с выбором ее типа и структуры и последующей настройкой параметров. Для получения требуемых показателей качества в структуру системы вводится дополнительный элемент, корректирующий ее характеристиками. Такой корректирующий элемент или устройство может быть электрическим, механическим, гидравлическим, пневматическим или иным, называемым обычно регулятором. Наиболее часто в системах управления в качестве регуляторов используются электрические схемы.
Корректирующее устройство – это элемент или схема, дополнительно вводимые в систему управления с целью исправления ее динамических характеристик.
Качество системы управления может быть описано как с помощью ее временных, так и частотных характеристик. Требования к качеству могут быть заданы, например, в виде величины максимального перерегулирования, времени максимума переходной характеристики и времени ее установления. Обычно необходимо задать максимально допустимую установившуюся ошибку при различных тестовых входных сигналов и внешних возмущений.
Применительно к диаграмме Боде разработан аналитический метод выбора параметров корректирующих устройств с опережением или отставанием по фазе. Простое однозвенное корректирующее устройство с передаточной функцией:
![]()
при α < 1 обладает отставанием по фазе, а при α > 1 создает опережение по фазе.
Довольно часто от системы управления
требуется, чтобы ее переходная
характеристика как можно быстрее
стремилась к установившемуся значению
с минимальным перерегулированием.
Системы такого типа принято называть
системами с апериодической реакцией.
В качестве меры близости переходной
характеристики к установившемуся
значению принимают зону, равную 2% от
этого значения. Тогда временем установления
считают время
![]() , за которое переходная характеристика
входит в указанную зону. Апериодическая
реакция характеризуется следующими
показателями:
, за которое переходная характеристика
входит в указанную зону. Апериодическая
реакция характеризуется следующими
показателями:
-
Установившаяся ошибка = 0.
-
Быстродействие это минимальное время нарастания и время установления.
-
 относительное
перерегулирование < 2%.
относительное
перерегулирование < 2%. -
Относительный выброс ниже установившегося значения < 2%.
-
Ход работы
Рассмотрим
систему управления намоткой ротора.
Цель синтеза – обеспечить высокую
точность при отработке системой линейного
входного сигнала. Рассмотрим регулятор
с передаточной функцией
![]() .
В этом случае установившаяся ошибка
при линейном входном сигнале будет
равна:
.
В этом случае установившаяся ошибка
при линейном входном сигнале будет
равна:
![]()
Чем больше мы сделаем K, тем меньше будет установившаяся ошибка. Однако, увеличение K будет негативно сказываться на переходной характеристике.
Построим переходные характеристики системы с пропорциональным регулятором.
K=[50 100 200 500];
numg=[1]; deng=[1 15 50 0];
sysg=tf(numg,deng);
t=[0:0.01:15];
for i=1:4
sys=feedback(K(i)*sysg,[1]);
y=step(sys,t);
Ys(:,i)=y;
end
plot(t,Ys(:,1),t,Ys(:,2),t,Ys(:,3),t,Ys(:,4))
xlabel('Time(s)'),ylabel('y(t)'), grid

Рис. 1. График переходных характеристик системы с пропорциональным регулятором .
При K = 500 установившаяся ошибка в случае линейного входного сигнала составляет 10% от скорости этого сигнала, но при ступенчатом воздействии величина перерегулирования равна 70%, а время установления – примерно 8 с.
Построим диаграмму Боде нескорректированной системы при K = 500.
K=500;
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
sys=K*sysg;
[Gm,Pm,Wcg,Wcp]=margin(sys);
Phi=(60-Pm)*pi/180;
alpha=(1+sin(Phi))/(1-sin(Phi))
[mag,phase,w]=bode(sys);
mag_save(1,:)=mag(:,1,:);
M=-10*log10(alpha)*ones(length(w),1);
semilogx(w,20*log10(mag_save),w,M),grid
xlabel('Частота(рад/сек)'),ylabel('Амплитуда(дБ)')
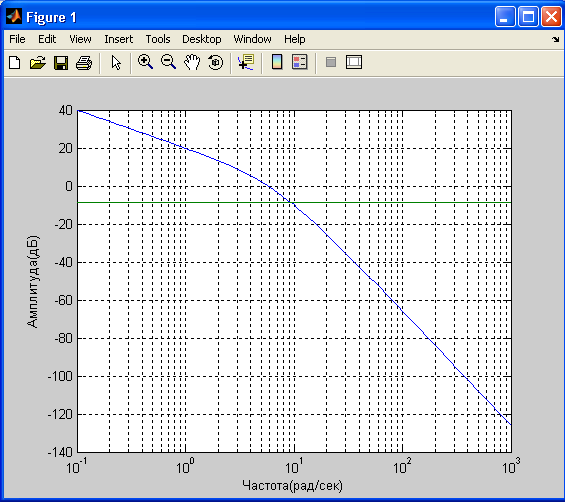
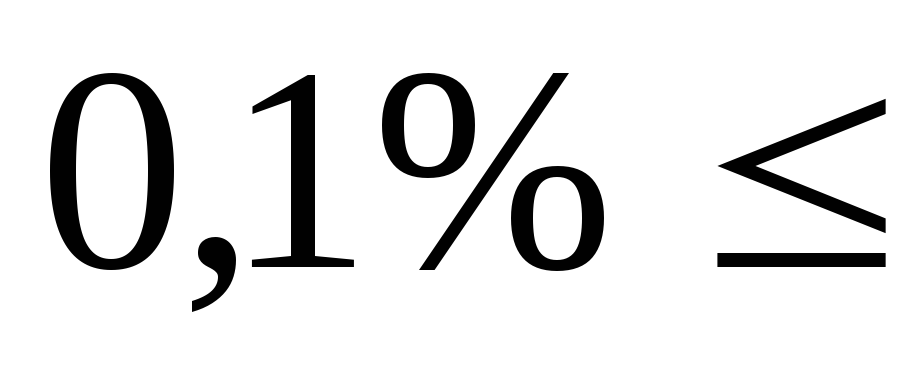
Рис. 2. График диаграммы Боде .
Мы нашли значение alpha = 6.9923. По графику определяем частоту, при которой амплитудная характеристика нескорректированной системы имеет значение -10lg(alpha). Эта частота равна 10 рад/сек.
Построим диаграмму Боде скорректированной системы. В данном случае при K = 1800.
K=1800;
numg=[1]; deng=[1 15 50 0];
numgc=K*[1 3.5]; dengc=[1 25];
sysg=tf(numg,deng);
sysgc=tf(numgc,dengc);
sys=series(sysg,sysgc);
margin(sys)
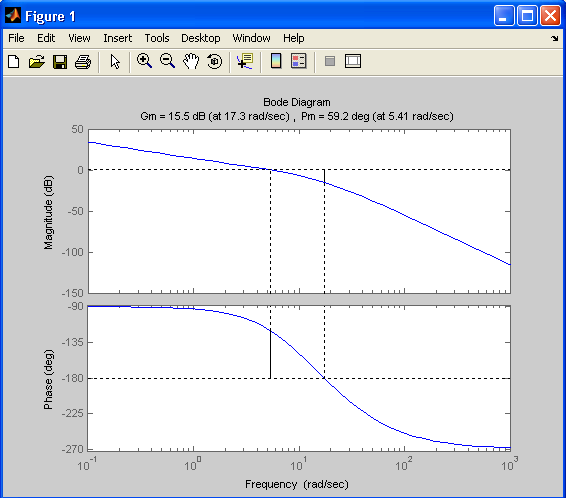
Рис. 3. График диаграммы Боде скорректированной системы.
Из графиков видно, что запас по амплитуде равен 15,5 дБ, а запас по фазе равен 59,2 градуса.
Построим переходную характеристику системы при K = 1800.
K=1800;
numg=[1]; deng=[1 15 50 0];
numgc=K*[1 3.5]; dengc=[1 25];
sysg=tf(numg,deng);
sysgc=tf(numgc,dengc);
syso=series(sysg,sysgc);
sys=feedback(syso,[1]);
t=[0:0.01:2];
step(sys,t)
ylabel('y(t)'),grid
Рис. 4. График переходной характеристики скорректированной системы.
Мы
применяли регулятор с опережением по
фазе. Чтобы уменьшить установившуюся
ошибку за счет увеличения
![]() ,
применим корректирующее устройство с
отставанием по фазе, имеющее передаточную
функцию
,
применим корректирующее устройство с
отставанием по фазе, имеющее передаточную
функцию
![]() ,
,
где
![]() .
Для синтеза такого устройства воспользуемся
методом корневого годографа. Область
желаемого расположения доминирующих
корней определяется параметрами ζ =
0,59 и
.
Для синтеза такого устройства воспользуемся
методом корневого годографа. Область
желаемого расположения доминирующих
корней определяется параметрами ζ =
0,59 и
![]() .
.
Построим корневой годограф скорректированной системы.
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
numgc=[1 0.1]; dengc=[1 0.01]; sysgc=tf(numgc,dengc);
sys=series(sysgc,sysg);
clf; rlocus(sysg); hold on
zeta=0.5912; wn=2.2555;
x=[-10:0.1:-zeta*wn]; y=-(sqrt(1-zeta^2)/zeta)*x;
xc=[-10:0.1:-zeta*wn]; c=sqrt(wn^2-xc.^2);
plot(x,y,':',x,-y,':',xc,c,':',xc,-c,':')
axis([-15,1,-10,10]);
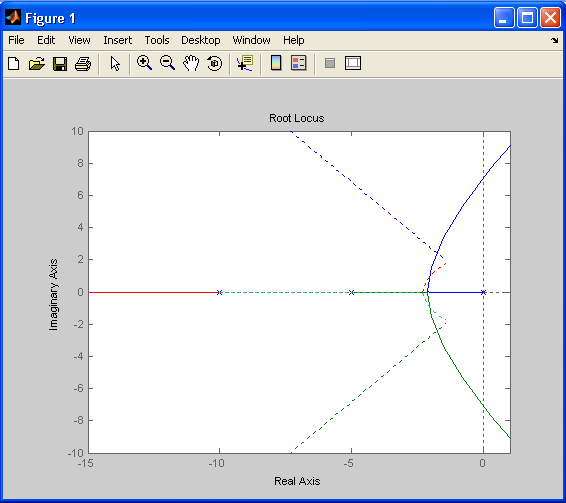
Рис. 6. б. График корневого годографа скорректированной системы.
Построим переходную характеристику скорректированной системы при K = 100.
K=100;
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
numgc=K*[1 0.1]; dengc=[1 0.01]; sysgc=tf(numgc,dengc);
syso=series(sysgc,sysg);
sys=feedback(syso,[1]);
step(sys);
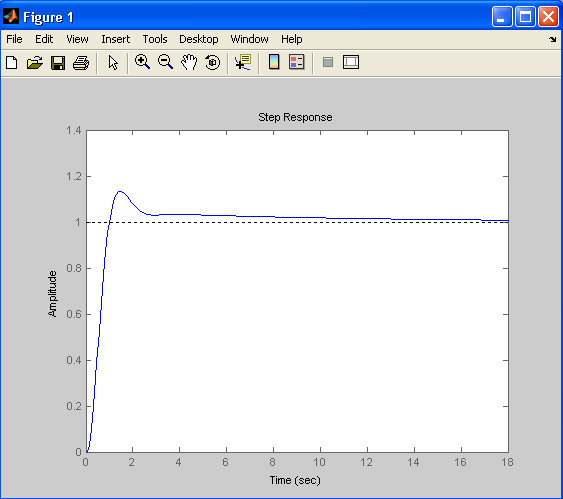
Рис. 7. График переходной характеристики скорректированной системы.
Из
графика видно, что время установления
![]() с.
Если мы проанализируем регулятор с
отставанием по фазе и регулятор с
опережением по фазе, то мы увидим
следующее:
с.
Если мы проанализируем регулятор с
отставанием по фазе и регулятор с
опережением по фазе, то мы увидим
следующее:
Для регулятора с опережением по фазе: перерегулирование при ступенчатом входном сигнале равно 13%; время установления равно 4 с.; установившаяся ошибка при линейном входном сигнале равна 10%.
Для регулятора с отставанием по фазе: перерегулирование при ступенчатом входном сигнале равно 8%; время установления равно 1 с.; установившаяся ошибка при линейном входном сигнале равна 20%.
Система чтения информации с диска.
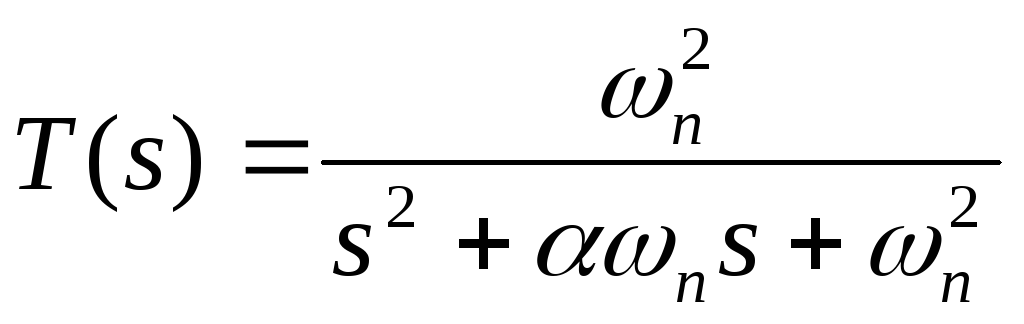
Мы синтезируем ПД-регулятор, удовлетворяющий следующим значениям к переходной характеристике системы:
Относительное перерегулирование менее 5%; время установления менее 150 мс. максимальное значение реакции на единичное возмущение менее 5·10־³. Наша цель - получить систему с апериодической реакцией, которая в замкнутом состоянии имеет передаточную функцию вида:
Возьмем α = 1,82. В этом случае нормированное
время установления
![]() .
Т.к. время установления должны быть
меньше 50 мс ( по условию ), то выберем
.
Т.к. время установления должны быть
меньше 50 мс ( по условию ), то выберем
![]() .
Тогда получим
.
Тогда получим
![]() мс. Знаменатель в выражении примет вид:
мс. Знаменатель в выражении примет вид:
![]()
Замкнутая система имеет характеристическое уравнение:
![]()
Получаем:
![]() и
и
![]() .
Находим
.
Находим
![]() и
и
![]() .
Тогда характеристика регулятора будет
равна
.
Тогда характеристика регулятора будет
равна
![]() .
.
Выводы:
Корректирующие устройства с опережением по фазе (как диаграммы Боде, так и корневой годограф) увеличивают запас по фазе и, следовательно, повышают устойчивость системы. Если предъявляются требования к коэффициенту ошибки, то синтез лучше производить с помощью диаграммы Боде. Если же коэффициент ошибки не задан, а предъявляются определенные требования к перерегулированию и времени установления переходной характеристики, то синтез корректирующего устройства с опережением по фазе проще выполнить с помощью корневого годографа. Если требуется иметь большие значения коэффициентов ошибки, то для коррекции систем обычно применяются устройства интегрирующего типа, обладающие отставанием по фазе. Коррекция с опережением по фазе приводит к увеличению полосы пропускания замкнутой системы, а коррекция с отставанием по фазе – наоборот, к ее уменьшению. Полоса пропускания может быть очень важным фактором, если система подвержена влиянию внешних шумов или если шум возникает внутри самой системы. Синтез выполняется только в том случае, если амплитудная характеристика скорректированной системы на диаграмме Боде пересекает уровень 0 дБ с наклоном -20дБ/дек.