

Задание на лабораторную работу
Создать математическую модель линейного динамического элемента с запаздыванием с использованием компьютера.
Исследовать поведение модели при различных значениях параметров A0, A1, A2, — см. выражение (31). Сравнить результаты компьютерного моделирования с результатами, полученными при теоретическом решении задачи.
В отчете необходимо представить графики для двух случаев, соответствующих неотрицательным значениям параметров модели — периодически и апериодически сходящегося решения:
-
соответствующего решения — y(t);
-
фазовой траектории решения на фазовой плоскости Oyy’.
Лабораторная работа n№ 4 Дискретная модель элемента. Конечный автомат Теоретическое введение. Моделирование с использованием конечных автоматов
Конечные автоматы и такие тесно связанные с ними конструкции, как, например, линейные грамматики и регулярные выражения, относятся к важнейшим основным понятиям информатики. Различные варианты конечных автоматов и близкие им математические объекты служат для описания и анализа технических устройств, различных систем и процессов, программ и алгоритмов. Многие сложные концепции теоретической информатики — и притом относящиеся не только к более общим моделям автоматов, таким как автоматы с магазинной памятью и машины Тьюринга, — были выработаны на базе теории конечных автоматов. Теория автоматов порождает ряд легко формулируемых, но далеко не тривиальных проблем. Они приводят к весьма сложным алгоритмам и отчасти проясняют причины, по которым необходимо систематическое развитие математического программирования и теории алгоритмов, сопровождаемое подробным анализом корректности и сложности. Теория конечных автоматов имеет многочисленные приложения в технической и практической информатике и составляет существенную часть теоретической информатики. Это делает знание методов моделирования на основе теории автоматов необходимым каждому специалисту по информатике.
Описание моделируемого объекта
В силовой установке требуется постоянно контролировать направление вращения цилиндрического вала с помощью автономно работающего прибора. Этот прибор должен в определенные моменты времени выдавать соответствующий направлению вращения вала сигнал, который далее может использоваться в других звеньях системы управления.
Допустим, что в
качестве датчика на конце вала закреплена
изолированная от него шайба, разделенная
на четыре сектора, из которых одна пара
противоположных секторов сделана
проводящей, а другая — непроводящей.
Пусть также у свободной стороны шайбы
расположен скользящий контакт (щетка),
который держит шайбу под постоянным
напряжением. Два других скользящих
контакта X![]() и X
и X![]() размещены так, что они касаются края
шайбы и пробегают при ее вращении
выделенные секторы один за другим, и,
кроме того, могут одновременно находиться
в пределах наименьшего из секторов.
Напряжения на контактах X
размещены так, что они касаются края
шайбы и пробегают при ее вращении
выделенные секторы один за другим, и,
кроме того, могут одновременно находиться
в пределах наименьшего из секторов.
Напряжения на контактах X![]() и X
и X![]() рассматриваются как входы конструируемого
автомата A, и считается, что эти входы
(при соответствующем нормировании)
принимают значения 0 и 1. В качестве
выхода автомата A можно
использовать напряжение 1, если шайба
вращается по часовой стрелке, и напряжение
0, если она вращается в противоположном
направлении (рис. 7).
рассматриваются как входы конструируемого
автомата A, и считается, что эти входы
(при соответствующем нормировании)
принимают значения 0 и 1. В качестве
выхода автомата A можно
использовать напряжение 1, если шайба
вращается по часовой стрелке, и напряжение
0, если она вращается в противоположном
направлении (рис. 7).
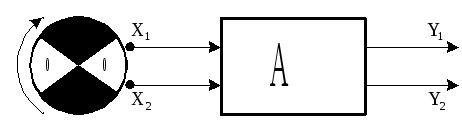
Рис. 7. Индикатор
Техническая реализация прибора далее обсуждаться не будет. Скажем только, что в системе предполагается наличие датчика тактов, устанавливающего моменты времени, в которые автомат A воспринимает входы и вырабатывает соответствующий выход. Следует отметить, что промежутки времени, в течение которых измеряются напряжения на контактах, должны быть очень короткими по сравнению с периодом вращения.