

лабораторная работа / ИССЛЕДОВАНИЕ МНОГОМЕРНЫХ СИСТЕМ (2)
.docБалаковский Институт Техники, Технологии и Управления
Факультет Инженерно-Строительный
Кафедра Управление и Информатика в Технических Системах
Практическая работа 5
по дисциплине
ТАУ
ИССЛЕДОВАНИЕ МНОГОМЕРНЫХ СИСТеМ
В ПРОСТРАНСТВЕ СОСТОЯНИЙ
Вариант
Выполнил ст. группы УИТ-32
Ромашкина Е.В.
Принял
Мартынова И.В.
г. Балаково 2006г.
Цель работы: ознакомление с описанием и исследованием динамических многомерных систем управления в пространстве состояний.
Задание:
-
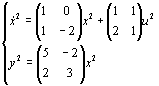
Привести все системы в варианте в форму (1).
-
Запустить систему MATLAB.
-
Создать три ss-объекта, в соответствии с заданным вариантом.
-
Определить управляемость и наблюдаемость каждой системы.
-
В соответствии со структурной схемой получить матрицы A, B, C соединения.
-
Определить управляемость и наблюдаемость соединения.
Задание:
1. 2.
2.
3.

схема:

Решение:
1.Создадим матрицы первой системы
>> A1=[3 3;2 1]
A1 =
3 3
2 1
>> B1=[-1 0;3 0]
B1 =
-1 0
3 0
>> C1=[1 2;2 -1]
C1 =
1 2
2 -1
Создадим матрицы второй системы
>> A2=[1 0;1 -2]
A2 =
1 0
1 -2
>> B2=[1 1;2 1]
B2 =
1 1
2 1
>> C2=[5 -2;2 3]
C2 =
5 -2
2 3
Создадим матрицы третей системы
>> A3=[1 2;3 -2]
A3 =
1 2
3 -2
>> B3=[1 0;2 0]
B3 =
1 0
2 0
>> C3=[-1 2;0 0]
C3 =
-1 2
0 0
создадим ss-объекты:
>> s1=ss(A1,B1,C1,0) >> s2=ss(A2,B2,C2,0) >> s3=ss(A3,B3,C3,0)
a = a = a =
x1 x2 x1 x2 x1 x2
x1 3 3 x1 1 0 x1 1 2
x2 2 1 x2 1 -2 x2 3 -2
b = b = b =
u1 u2 u1 u2 u1 u2
x1 -1 0 x1 1 1 x1 1 0
x2 3 0 x2 2 1 x2 2 0
c = c = c =
x1 x2 x1 x2 x1 x2
y1 1 2 y1 5 -2 y1 -1 2
y2 2 -1 y2 2 3 y2 0 0
d = d = d =
u1 u2 u1 u2 u1 u2
y1 0 0 y1 0 0 y1 0 0
y2 0 0 y2 0 0 y2 0 0
Continuous-time model. Continuous-time model. Continuous-time model.
3.Исследуем наблюдаемость и управляемость каждой системы, для чего построим соответствующие матрицы и посчитаем их ранги
>> rank(ctrb(A1,B1)) >> rank(ctrb(A2,B2)) >> rank(ctrb(A3,B3))
ans = ans = ans =
2 2 2
>> rank(obsv(A1,C1) >> rank(obsv(A2,C2)) >> rank(obsv(A3,C3)
ans = ans = ans =
2 2 2
Видно, что во всех случаях ранги матриц управляемости и наблюдаемости совпадают с размерностями пространства состояний.
4. Получим систему, определяемую соединением.
Для корректного использования функции connect введем дополнительную систему, передаточная функция которой равна 1
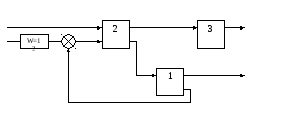
>> s4=tf(1)
Transfer function:
1
>> sys=append(s1,s2,s3,s4);
>> Q=[3 1 5;2 3 4;4 0 0];
>> in=[2 5];
>> out=[4 1];
>> s_com=connect(sys,Q,in,out);
>> A=s_com.A
A =
3 3 0 0 0 0
2 1 0 0 0 0
1 2 1 0 -1 2
2 4 1 -2 -2 4
0 0 0 0 1 2
0 0 0 0 3 -2
>> B=s_com.B
B =
0 0
0 0
0 0
0 0
0 1
0 2
>> C=s_com.C
C =
0 0 2 3 0 0
1 2 0 0 0 0
>> rank(ctrb(A,B))
ans =
4
>> rank(obsv(A,C))
ans =
6
Вывод:
Результаты показывают, что система не управляема и наблюдаема.