

лабораторная работа / Исследование многомерных систем в пространстве состояний
.doc
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
ЛАБОРАТОРНАЯ РАБОТА №3
по дисциплине
Теория автоматического управления
Исследование многомерных систем в пространстве состояний
Выполнил ст. гр. УИТ-41
Сербаев В.В.___________
Принял преподаватель
Мефедова Ю.А.___________
«_____»__________2003г.
2003г
Вариант №17
Цель работы: ознакомление с описанием и исследованием динамических многомерных систем управления в пространстве состояний.
З адание:
адание:
1.
![]()
2.
 3.
3.
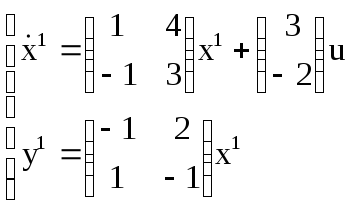
1 Приведем систему 1 к виду (3)
2 Создадим матрицы систем
A1=[1 4;-1 3] B1=[3;-2] C1=[-1 2;1 -1]
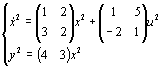
A2=[1 2;3 2] B2=[1 5;-2 1] C2=[4 3]
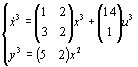
A3=[1 2;3 2] B3=[14;1] C3=[5 2]
3 Создадим SS-объекты
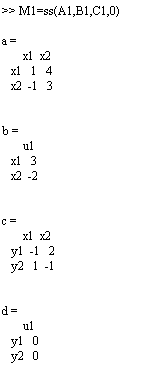


3 Исследуем наблюдаемость и управляемость каждой системы, для чего построим соответствующие матрицы и посчитаем их ранги
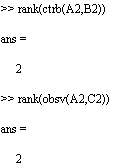


Видно, что система управляема и наблюдаема.
4 Получим систему, определяемую соединением
Д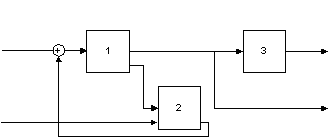 ля
правильного использования функции
connect
введем
дополнительные звенья W4 и W5
ля
правильного использования функции
connect
введем
дополнительные звенья W4 и W5
![]()
1
1 4 4
5 6 6
1
2
4 5 5
2 3
Составим матрицу соединения и определим вход-выход
Q=[1 -2 6;2 1 0;4 1 0;5 1 0]
in=[3 6] out=[4 5]
![]()
4. Вычислим ранги матриц наблюдаемости и управляемости итоговой системы
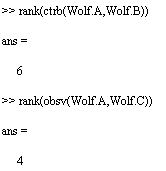
Т.е. система управляема, но не наблюдаема, т.к. n=6.
Вывод: воспользовавшись пакетом MatLAB, мы смогли определить ранги матриц управляемости и наблюдаемости отдельных звеньев и всей системы. Было показано, что возникнут трудности с определением начального состояния системы, по ее конечному состоянию.