

Лабораторная работа №2 Статические и астатические сау
Цель работы: исследовать статические и динамические свойства статических и астатических систем автоматического управления в среде MATLAB, EWB и MathCAD.
Введение
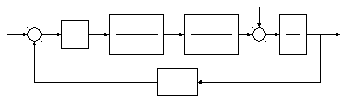
Статическая система (рис. 1) состоит из двух апериодических звеньев первого порядка с передаточными функциями W1(p), W2(p), усилительного звена (Wy(p)) и звена обратной связи (Woc(p)), параметры которых приведены в таблице 1.
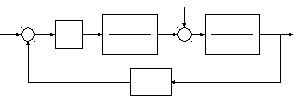

Wy(p) W1(p) f W2(p)
к1 к2
ХВХ - кУ - ХВЫХ
Т1р + 1 Т2р + 1
Woc(p)
кОС
Рис. 1
Таблица 1
|
№ варианта |
к1 |
к2 |
Т1, с |
Т2, с |
Т3, с |
кОС |
|
1 2 3 4 5 6 7 8 9 10 |
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 |
2 1.67 1.43 1.25 1.11 1 0.9 0.83 0.77 0.71 |
0.01 0.02 0.03 0.04 0.05 0.06 0.05 0.04 0.02 0.01 |
0.1 0.5 0.9 0.4 0.2 0.7 0.6 0.4 0.3 0.8 |
0.1 0.3 0.2 0.5 0.6 0.7 0.4 0.2 0.5 0.3 |
0.5 0.8 0.4 1.2 1.1 1.0 0.9 0.7 1.3 0.6 |
Исследование статической САУ в среде EWB 5.12
Собрать электронную модель САУ (рис. 2) и отредактировать её в соответствии с номером варианта. Принять R1 = R3 = R5 = R7 = R9 = R10 = R11 = 100 кОм. Входной сигнал – (1 – 5) B, возмущение - 1В..
Параметры остальных элементов схемы рассчитать по формулам:
R2 = кУ*R1; R4 = к1*R3; R6 = к2*R5; R8 = кос*R7;
C1 = T1/R4; C2 = T2/R6.
Коэффициент обратной связи кОС принять равным единице.

Рис. 2
Установить с помощью резистора R2 значение коэффициента передачи усилительного звена, равным 1. Снять кривые переходных процессов по заданию и возмущению (рис. 3), определить время переходного процесса (отклонение ±5%), максимальное и минимальное значения выходного сигнала Uмах и Uмин, установившееся значение Uy, рассчитать статическую ошибку и перерегулирование по формулам
ε = (Uз – Uу)/Uз*100%;
sх = (Uмах – Uy)/Uy*100%; σf = (Uу – Uмин)/ Uу*100%.
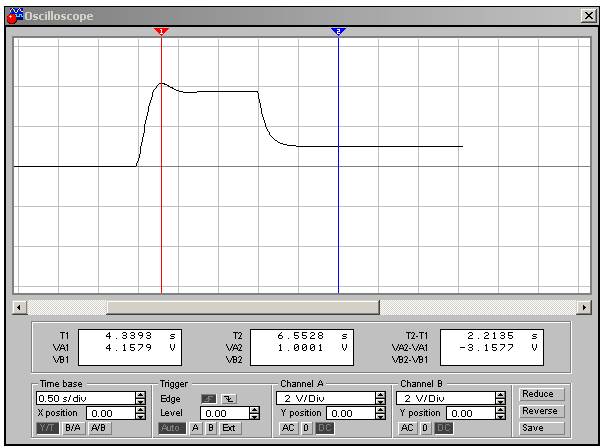
Рис. 3
Повторить эксперименты для ку = 5, 10, 15, 20 и 25.
Построить графики зависимости Uмах, Uy, s, времени переходного процесса tпп от ку.
По схеме рис. 4 снять логарифмические амплитудную L(ω) и фазовую φ(ω) частотные характеристики (рис. 5, 6) разомкнутой САУ.
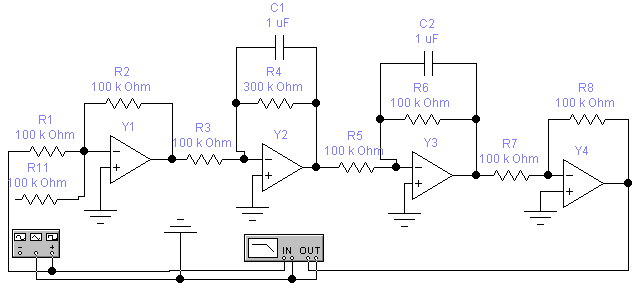
Рис. 4
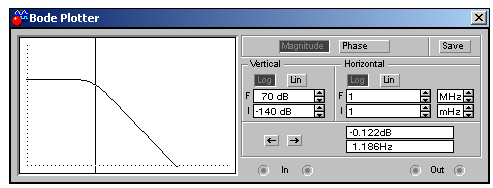
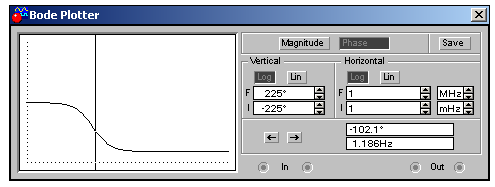
Рис. 5
Определить частоту среза ωср, значение фазы на этой частоте φср, частоту ωπ, значение фазы на этой частоте φπ и L(ωπ). Рассчитать запас устойчивости по амплитуде
∆L ≈ L(ωср) – L(ωπ)
и фазе
∆φ ≈ φср - φπ.

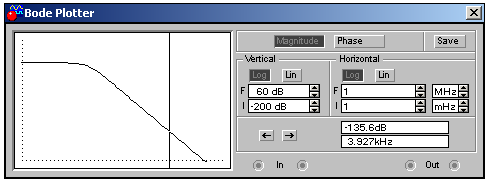
Рис. 6
Повторить эксперименты для ку = 5, 10, 15, 20 и 25.
Построить графики зависимости ∆L и ∆φ от ку.
Исследование статической САУ в среде MATLAB + Simulink.
В среде MATLAB + Simulink создать модель статической системы (рис. 7). Снять кривые переходных процессов, определить по ним время переходного процесса, перерегулирование и статическую ошибку. Сравнить полученные результаты с результатами моделирования в среде EWB.

Рис. 7
Рассчитать передаточные функции САУ по заданию Wz(p) и возмущению Wf(p), полюсы передаточной функции.
Пример расчёта:
>> wy=tf([100])
Transfer function:
100
>> w1=tf([2],[0.31 1])
Transfer function:
2
----------
0.31 s + 1
>> w2=tf([0.11],[0.2 1])
Transfer function:
0.11
---------
0.2 s + 1
>> woc=tf([1])
Transfer function:
1
>> wrx=wy*w1*w2
Transfer function:
22
----------------------
0.062 s^2 + 0.51 s + 1
>> wzx=feedback(wrx, woc, -1)
Transfer function:
22
-----------------------
0.062 s^2 + 0.51 s + 23
>> pole(wzx)
ans =
-4.1129 +18.8163i
-4.1129 -18.8163i
>> wrf=w2
Transfer function:
0.11
---------
0.2 s + 1
>> wocf=woc*w1*wy
Transfer function:
200
----------
0.31 s + 1
>> wzf=feedback(wrf, wocf, -1)
Transfer function:
0.0341 s + 0.11
-----------------------
0.062 s^2 + 0.51 s + 23
>> zero(wzf)
ans =
-3.2258
>> step(wzx) (рис. 8)
>> bode(wrx) (рис. 9)

Рис. 8

Рис. 9
С помощью подпрограммы ltiview(w) построить временные и частотные характеристики статической системы и сравнить их с предыдущими.
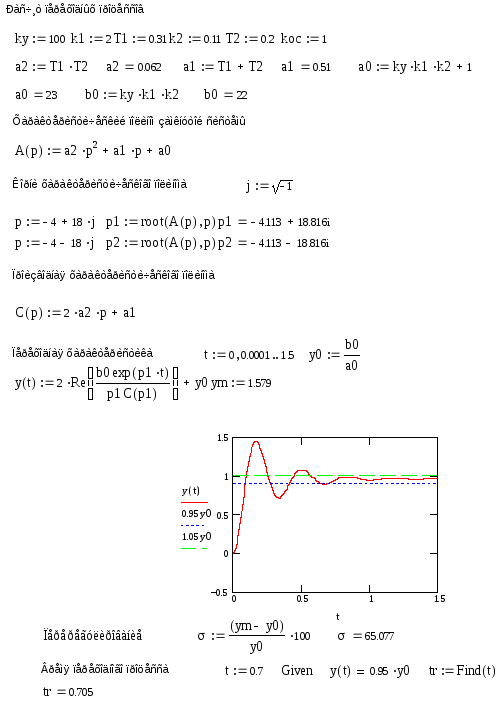
Исследование статической САУ в среде MathCad.
С помощью пакета прикладных программ MathCAD рассчитать переходную и частотные характеристики (L(ω), (φ(ω)). Определить время переходного процесса tпп, перерегулирование, запасы устойчивости по амплитуде и фазе.

2. Исследование астатической САУ.
Характерный признак астатической системы – наличие интегрирующего звена в структуре САУ (рис. 10).
Wy(p)
W1(p)
W2(p)
W3(p)
Хвх к1 к2 f 1 Хвых
_ кУ _
Т1р + 1 Т2р + 1 T3p
кос
Рис. 10
Исследование астатической САУ в среде EWB 5.12
Собрать электронную модель (рис. 11) и отредактировать её в соответствии с номером варианта. Принять R1 = R3 = R5 = R7 = R8 = R9 = R11 = 100 кОм. Напряжение источника питания U = (1 – 5) B.
Рассчитать граничное значение коэффициента передачи разомкнутого контура по формуле
Кгр = (T1 + T2)/(T1*T2),
при котором в системе должны наблюдаться незатухающие колебания.
Рассчитать граничное значение коэффициента передачи усилительного звена
кУГР = Кгр/(к1*к2*кос*1/T3)
Параметры остальных элементов схемы рассчитать по формулам:
R2 = кУ*R1; R4 = к1*R3; R6 = к2*R5; R10 = кос*R9;
C1 = T1/R4; C2 = T2/R6; C3 = T3/R7.
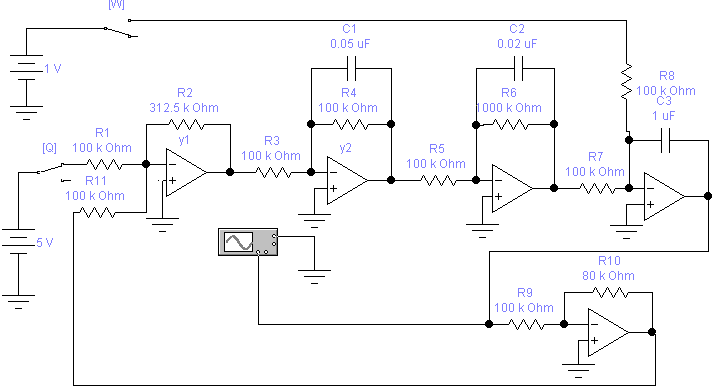
Рис. 11
На экране осциллографа (рис. 12) наблюдать незатухающие колебания, амплитуду которых необходимо измерить.
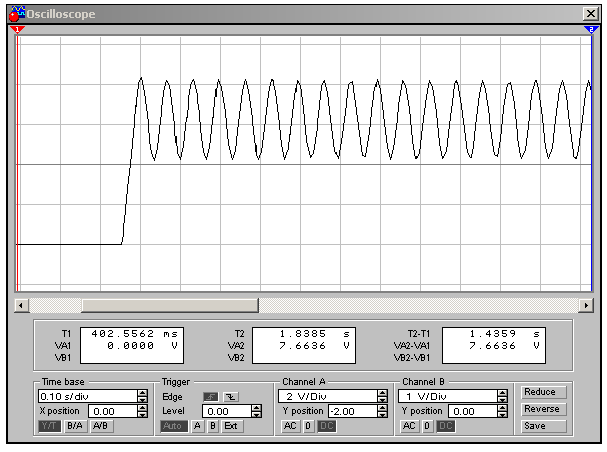
Рис. 12
Снять кривые переходных (рис. 13) процессов для ку = (0.2 0.4 0.6 0.8)кУГР. Задающее воздействие (1 -5) В, возмущающее воздействие – (1 – 2) В. Определить прямые показатели качества и построить их зависимость от ку.
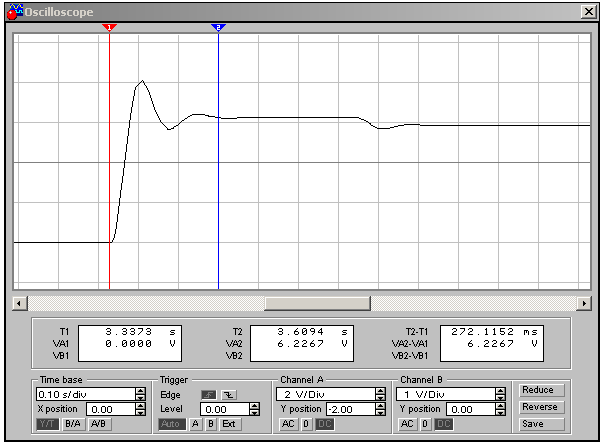
Рис. 13
По схеме рис. 14 снять ЛАЧХ и ЛФЧХ системы (рис. 15, 16). Определить запас устойчивости по амплитуде и фазе.
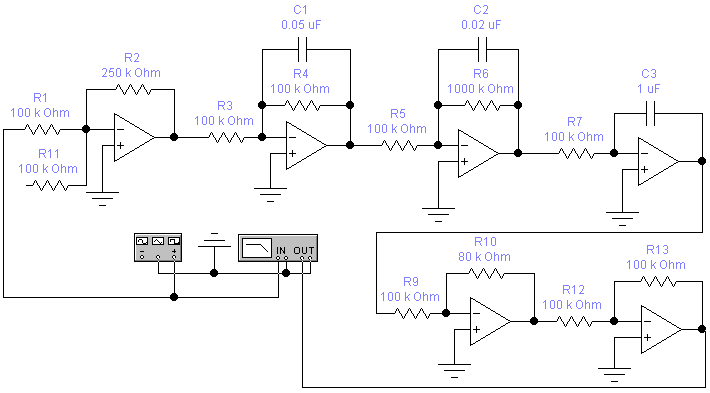
Рис. 14
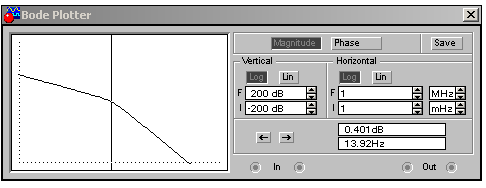

Рис. 15


Рис. 16
Изменить структуру системы, поменяв местами апериодическое и интегрирующее звено (рис. 17). Повторить предыдущие опыты (рис. 18) и определить прямые показатели качества. Сравнить перерегулирования по нагрузке с предыдущей системой.
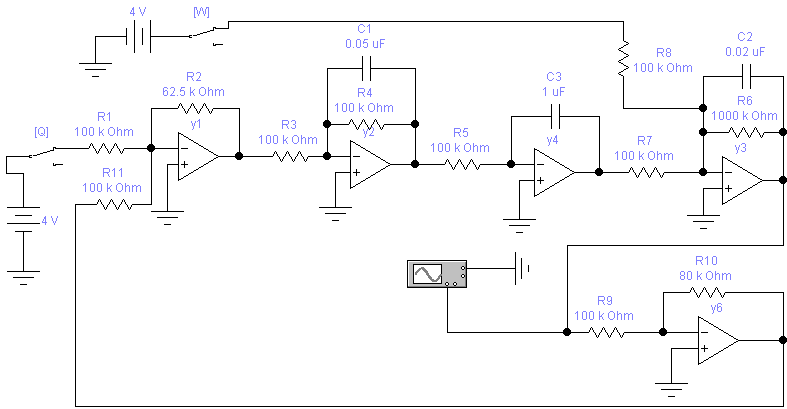
Рис. 17

Рис. 18
Исследование астатической САУ в среде MATLAB + Simulink.
В среде MATLAB + Simulink создать модель астатической системы (рис. 19). Снять кривые переходных процессов при различных значениях ку, определить по ним время переходного процесса, перерегулирование и статическую ошибку. Сравнить полученные результаты с результатами моделирования в среде EWB.
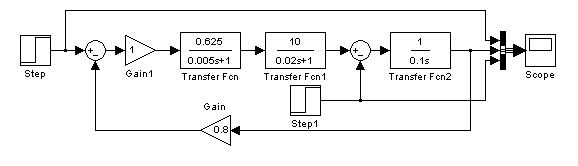
Рис. 19
Рассчитать передаточные функции САУ по заданию Wz(p) и возмущению Wf(p), нули и полюсы передаточной функции. С помощью подпрограммы ltiview(w) построить временные и частотные характеристики астатической системы и сравнить их с предыдущими.
Изменить структуру системы, поменяв местами инерционное звено W2(p) и интегрирующее звено W3(p) (рис. 20).

Рис. 20
Снять кривые переходных процессов при различных значениях ку, определить по ним время переходного процесса, перерегулирование и статическую ошибку. Сравнить полученные результаты с результатами моделирования в среде EWB. Рассчитать передаточную функцию САУ по возмущению Wf(p) и нули передаточной функции. С помощью подпрограммы ltiview(w) построить временные и частотные характеристики астатической системы и сравнить их с предыдущими.
Исследование астатической САУ в среде MathCad.
С помощью пакета прикладных программ MathCAD рассчитать переходную и частотные характеристики (L(ω), (φ(ω)). Определить время переходного процесса tпп, перерегулирование, запасы устойчивости по амплитуде и фазе. Сравнить полученные результаты с предыдущими.
Контрольные вопросы.
Дайте определение статической и астатической системы. Что такое астатизм системы?
Как влияет передаточный коэффициент разомкнутой системы на на статические и динамические свойства систем управления? Почему перерегулирование по возмущению в статических и астатических системах разное?
Что такое запас устойчивости по амплитуде и фазе? Как определить эти показатели по логарифмическим частотным характеристикам?
Влияет ли структура и точка приложения сигнала на астатизм системы?