

36 Устойчивость нсау. Понятие устойчивости по Ляпунову.
1)Если все вещественные части корней характеристического уравнения линеаризованной системы отрицательны, то линеаризованная система устойчива. Её невозмущенные движения асимптотически устойчивы и никакие добавки в виде членов с различными нелинейностями не смогут сделать систему неустойчивой.
2)Если по крайней мере один корень линеаризованной системы содержит положительную вещественную часть, то система неустойчива.
3)Если вещественные части корней характеристического уравнения линеаризованной системы равны 0, то свойство устойчивости линеаризованной системы будет неопределенным (система на границе устойчивости).
37 Импульсные сау. Виды квантования.
Определение: Импульсные системы – это такие САУ, в которых имеются сигналы квантованные по времени. Импульсную САУ можно в общем случае представить блок-схемой: εyx
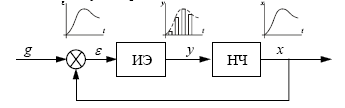
ИЭ – импульсный элемент;
НЧ – непрерывная часть.
Возможны и более сложные импульсные САУ с несколькими ИЭ, однако в лекциях мы рассмотрим лишь САУ с одним ИЭ. Определение: Квантование, осуществляемое ИЭ в виде преобразовния непрерывного сигнала в последовательность импульсов, называется импульсной модуляцией.
Существует три вида импульсной модуляции:
1. амплитудно-импульсная (АИМ);
2. широтно-импульсная (ШИМ);
3. время-импульсная (ВИМ);
3.1. фазо-импульсная (ФИМ);
3.2. частотно-импульсная (ЧИМ).
Сущность каждого вида модуляции поясняется на рис
Входной сигнал (его величина) называется моделирующим сигналом ИЭ. Модулируемыми параметрами выходного сигнала ИЭ могут служить высота (амплитуда), ширина и период повторения импульса.

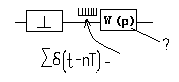
38 Z-преобразование или дискретное преобразование Лапласа.
Преобразование Лапласа и z-преобразование вычислить z-образн. и z-предаточную ф-цию, которая аналогична комплексной ф-ции W(jω).
![]()
![]()
![]()
 на
выходе
на
выходе
Алгоритм перехода
![]()
Для того чтобы выбрать время T, нужно применить теорему Котельникова.
Частота дискретизации непрерывного сигнала должна не менее чем в 2 раза превышать макс. частоту, содержащуюся в спектре исходного сигнала.
![]()
Выбор частоты дискретизации:
1. Исходя из max частоты пропускания самого высокочастотного и звеньев.
Сложность передат. ф-ции напрямую осу
39 Передаточные функции разомкнутой и замкнутой импульсной сау.
Характеристические уравнения систем
Типовая структура замкнутой САУ, передаточная функция и характеристическое уравнение разомкнутой системы.

![]() –передаточная
функция разомкнутой системы.
–передаточная
функция разомкнутой системы.
Для линейных систем применим принцип суперпозиции воздействий (независимых воздействий).
![]() - Передаточная
функция замкнутой системы относительно
регулирующей величины по задающему
воздействию.
- Передаточная
функция замкнутой системы относительно
регулирующей величины по задающему
воздействию.

![]() –передаточная
функция замкнутой системы относительно
задающей величины по возмущающему
воздействию.
–передаточная
функция замкнутой системы относительно
задающей величины по возмущающему
воздействию.
![]() –передаточная
функция замкнутой системы относительно
ошибки регулирования, по задающему
воздействию.
–передаточная
функция замкнутой системы относительно
ошибки регулирования, по задающему
воздействию.
![]() –передаточная
функция замкнутой системы относительно
ошибки регулирования, по возмущающему
воздействию.
–передаточная
функция замкнутой системы относительно
ошибки регулирования, по возмущающему
воздействию.
![]() –передаточная
функция разомкнутой системы
–передаточная
функция разомкнутой системы

![]() –Характеристическое
уравнение разомкнутой системы получается
приравниванием к нулю знаменателя
передаточной функции разомкнутой
системы.
–Характеристическое
уравнение разомкнутой системы получается
приравниванием к нулю знаменателя
передаточной функции разомкнутой
системы.
Для нахождения характеристического уравнения замкнутой системы необходимо также приравнять к нулю знаменатель передаточной функции замкнутой системы
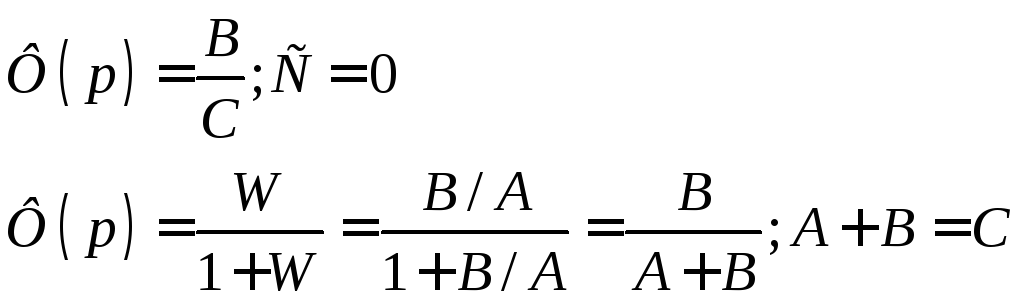
Характеристическое уравнение замкнутой системы может быть получено приравниванием к 0 суммы числителя и знаменателя передаточной функции разомкнутой системы.